

Roboter mit schwitzenden Fingern
Das Prinzip, Temperatur durch Schweiß aus den eigenen Poren zu regulieren, könnte auch bei Robotern nützlich sein, wie US-Forscher erprobt haben.
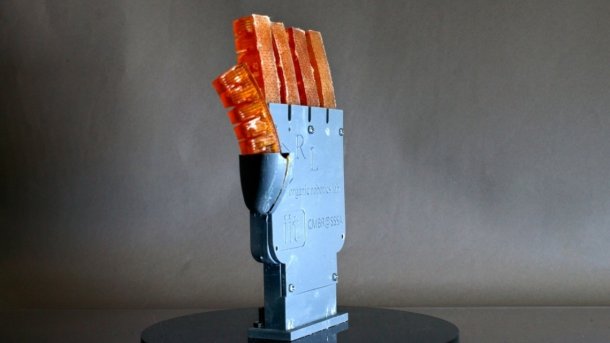
(Bild: cornell.edu)
Schweißgeruch bei Roboterwettkämpfen geht in der Regel nicht von den Robotern aus, sondern zeugt zumeist von den unermüdlichen Anstrengungen der menschlichen Betreuer, ihre Maschinen auf Höchstleistung zu bringen. Nur vereinzelt wird das Prinzip der Verdampfungswärme bislang auch zur Kühlung von Servomotoren genutzt. Ein Team von US-Wissenschaftlern hat der Robotik jetzt neue Dimensionen des Schwitzens erschlossen.
Der amtierende Humanoid-Vizeweltmeister beim RoboCup heißt nicht umsonst Sweaty (verschwitzt): Denn die besonders belasteten Motoren des Roboters, der seit 2014 in der Adult Size des Fußballturniers antritt, werden mit Wasser gekühlt – er schwitzt tatsächlich! Allerdings besteht Sweaty aus harten Materialien wie Aluminium und Kohlefaserverbundstoffen und das Wasser wird von außen aufgesprüht.
Schweiß direkt aus den Poren
Bei der Roboterhand, die Robert F. Shepherd und sein Team an der Cornell University jetzt in Science Robotics vorgestellt haben, kommt der Schweiß dagegen direkt aus den Poren. Anders als Sweaty besteht diese Hand mit Fingern aus weichem Material. Ein Vorteil solcher Soft Robots liegt unter anderem in der größeren Flexibilität beim Greifen, weil sich die Finger besser der Form des jeweiligen Gegenstands anpassen können. Die gegenüber Metallen geringere Wärmeleitfähigkeit erschwert dagegen die Regulierung der Temperaturen.
Das Problem der Hitzeableitung haben die Forscher gelöst, indem sie die Finger aus zwei verschiedenen Hydrogelen konstruiert haben, die unterschiedlich auf Temperaturen reagieren. Über einem Kern aus Poly-N-Isopropylacrylamid liegt eine Schicht aus porösem Polyacrylamid, die sich bei Temperaturen über 30 Grad Celsius ausdehnt. Dadurch erweitern sich die 200 Mikrometer großen Poren, sodass hydraulische Flüssigkeit, mit der der Finger angetrieben wird, austreten kann. Die Temperatur an der Oberfläche des Fingers könne dadurch innerhalb von 30 Sekunden um 21 Grad Celsius gesenkt werden, berichten die Wissenschaftler.
Anwendungen im Schneckenstil auch denkbar
"Das Beste an dieser synthetischen Strategie“, sagt Ko-Autor Thomas J. Wallin, "besteht darin, dass die Temperaturregulierung sich auf das Material selbst stützt. Wir brauchten keine Sensoren oder andere Komponenten, um die Schwitzrate zu kontrollieren. Wenn die lokale Temperatur den Schwellenwert überschritt, öffneten oder schlossen sich die Poren von selbst.“ Die Forscher betonen, dass das Verfahren hinsichtlich der Porenform und -größe wie auch der verwendeten hydraulischen Flüssigkeit noch erheblich optimiert werden könne.
Außerdem seien neben der Temperaturregulierung weitere Anwendungen denkbar. So könnten Roboter die ausgetretene Flüssigkeit nutzen, um wie Schnecken die Reibung mit dem Untergrund zu verringern, oder schädliche Stoffe zu lösen. Um all diese Möglichkeiten auszureizen, sei aber die Zusammenarbeit vieler Disziplinen erforderlich, betont Shepherd. (axk)
