

NASA SPARROW: Hüpfroboter mit Dampfantrieb könnte Eismonde erkunden
Dampfantrieb ist zwar antiquiert, doch die NASA sieht darin unter bestimmten Umständen ein geeignetes Antriebskonzept für Erkundungsroboter auf Eismonden.
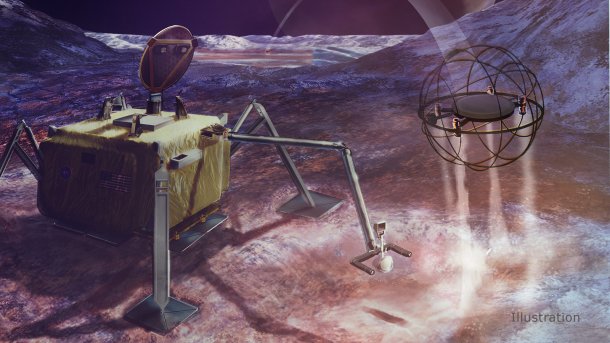
Eine Darstellung des SPARROW-Konzepts.
(Bild: NASA JPL)
Das NASA Jet Populsion Labarory in Pasadena im US-Bundesstaat Kalifornien untersucht ein Konzept, das Wasserdampfstöße zum Antrieb eines Erkundungsroboters nutzt, um ihn über zerklüftete Mondoberflächen springen zu lassen. Die NASA sieht diesen Antrieb geeignet, um den Steam Propelled Autonomous Retrieval Robot for Oceon Worlds (SPARROW) auf Monden wie Jupiters Europa und Saturns Enceladus einzusetzen. Dort sei genug Eis vorhanden, um den Antrieb damit zu befeuern.
SPARROW hat in etwa die Größe eines Fußballs, heißt es in einer Mitteilung des NASA Jet Populsion Laboratory. In dem Roboter befinden sich Triebwerke, Steuerungseinheit und Forschungsinstrumente, die von einem kugelförmigen Schutzkäfig umschlossen sind.
Dieser auf den ersten Blick ungewöhnlich scheinende Aufbau des Roboters ergibt für seinen möglichen Einsatzzweck jedoch Sinn. Denn nach Ansicht der NASA könnte er zur Erkundung auf Monden in unserem Sonnensystem eingesetzt werden, auf denen Eis vorhanden ist. Solche Monde wie beispielsweise der Jupitermond Europa bringen damit schon gleich den passenden "Treibstoff" für den Dampfantrieb mit, denn das Eis des Mondes könnte dafür zu Wasser geschmolzen werden. Anderer Treibstoff muss also nicht erst zum Mond mitgenommen werden.
Videos by heise
Ab zur Tanke
Das Eis soll ein Lander gewinnen, schmelzen und SPARROW dann mit Wasser betanken. Der Roboter heizt dann das Wasser auf und erzeugt kurze Dampfstöße. Die Dampfstöße sollen SPARROW dann über viele Kilometer zerklüfteter, gletscherartiger Mondoberfläche springen lassen, die beispielsweise mit radgetriebenen Robotern nur schwierig zu erkunden wären. Dem Dampfantrieb von SPARROW spielt dabei in die Karten, dass sich der Roboter aufgrund des fehlenden atmosphärischen Widerstands einfacher durch die Gegend katapultieren lässt. Der Lander dient dem Erkundungsroboter außerdem als Basis: Geht das Wasser aus, kehrt er zum Auftanken zum Lander zurück.
Gareth Meirion-Griffith, Leiter des Forschungsprojektes, sieht das Antriebskonzept als optimal an: "Es könnte porös sein, es könnte mit Gletscherspalten übersäht sein und Büßereis geben, die die meisten Roboter auf ihrem Weg aufhalten könnten. Aber SPARROW beherrscht das Gelände total; er besitzt die völlige Freiheit, sich durch ein ansonsten unwirtliches Terrain zu bewegen."
Nach Ansicht der Forscher sollen zur Erkundung gleich mehrere SPARROWs eingesetzt werden, um möglichst viel der Umgebung gleichzeitig erkunden zu können.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Weitere Entwicklungsarbeit notwendig
Bisher befindet sich das Wasserdampfantriebssystem in der Entwicklungs- und Erprobungsphase. Das System soll dabei den Dampf möglichst effektiv erzeugen. Das Forscherteam ermittelte außerdem in Computersimulationen, wie sich der kugelförmige Roboter optimal durch das Gelände bewegen kann. Dazu suchten sie nach dem optimalen Startwinkel und der effizientesten Sprunggeschwindigkeit, damit sich der Roboter bestmöglich in chaotischem Gelände bewegen kann.
Noch ist das System aber nicht einsatzbereit. Bisher haben die Forscher aus dem NASA Innovative Advanced Concepts Programm (NIAC) lediglich Mittel zur grundlegenden Forschung erhalten, um auch die generelle Tauglichkeit eines solch zukünftigen Systems zu untersuchen. Erst wenn die gegeben ist, könnte ein funktionierender Erkundungsroboter mit Dampfantrieb entwickelt und in zukünftigen Missionen eingesetzt werden.


(olb)
