

Erste Schritte mit dem Raspberry Pi Pico – die Thonny-IDE
Es gibt verschieden Möglichkeiten, wie sich der Raspberry Pi Pico zum Leben erwecken lässt. Die Reise beginnt mit der kostenlosen Python-IDE Thonny.
- Dr. Michael Stal
Der letzte Artikel hat das neue Board Raspberry Pi Pico vorgestellt. In diesem und den nachfolgenden Teilen ist von den verschiedenen Möglichkeiten die Rede, wie sich das Board zum Leben erwecken lässt. Die Reise beginnt mit der kostenlosen Python-IDE Thonny.
Die Thonny-IDE bietet eine Python-Shell, die eher einfachen und mittleren Ansprüchen genügt. Für höhere Anforderungen haben ihre Schöpfer sie allerdings auch nicht entwickelt. Ihre Entwicklung erfolgte durch die University of Tartu in Estland, um einen einfachen Einstieg in das Programmieren mit Python zu ermöglichen.
Um die Programmierung für das Pico-Board zu illustrieren, ist das aber mehr als ausreichend. Bevor die Artikelreihe auf ausgefeilte IDEs für Pros zu sprechen kommt, verhilft Thonny-IDE zu ersten Erfahrungen mit dem Raspberry Pi Pico. Darüber hinaus ist die freie IDE auf Raspberry Pi OS bereits vorinstalliert, sodass Raspi-Nutzer nichts weiter zu tun haben und sich jetzt gemütlich zurücklehnen können. Zu guter Letzt sei angemerkt, dass die Programmierumgebung eine vollständige Implementierung von Python 3.7 mitbringt, weshalb sich keine weiteren Installationsorgien als notwendig erweisen.
Auf der Thonny-Webseite lassen sich Versionen für Windows, macOS oder Linux-Distributionen herunterladen:
Installation der IDE
Nach Durchführung des Downloads auf Windows oder macOS starten Anwender die Installation durch Ausführung des Installationspakets. Linux-Anwender nutzen entweder ihren jeweiligen Paketmanager oder andere Möglichkeiten zur Installation (siehe Thonny auf GitHub).
Exemplarisch die Illustration für Windows-PCs. Nach Start der Installation ergibt sich folgendes Bild:

Danach findet sich das Programm auf dem Zielsystem. Bei Start der fertig installierten IDE öffnet das schlichte IDE-Fenster von Thonny, das in der oberen Hälfte einen Editor und in der unteren Hälfte eine REPL-Shell (Read Eval Print Loop) enthält. Fürs interaktive Experimentieren bietet die Shell eine ideale Spielwiese.

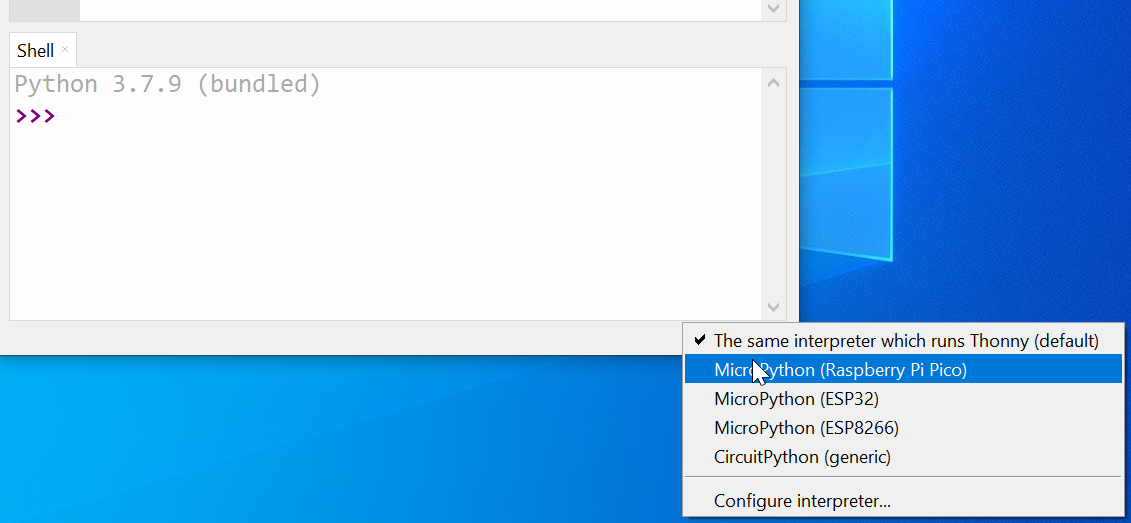
Unten rechts im Fenster zeigt Thonny den aktuell genutzten Python-Interpreter textuell an, im vorliegenden Fall also Python 3.7.9. Allerdings laufen auf den meisten Embedded Boards nur abgespeckte Python-Varianten wie CircuitPython oder MicroPython, wobei der Pico per default Letzteres unterstützt.
Um die geeignete Variante zu erhalten, genügt ein Mausklick auf das Textfeld "Python 3.7.9". Anschließend bietet Thonny ein Auswahlmenü mit allen unterstützten Interpretern, unter anderem "MicroPython (Raspberry Pi Pico)":
Vor der Selektion von MicroPython sollten Entwickler das Raspberry-Pi-Pico-Board mit gedrückter BOOTSEL-Taste an einen USB-Eingang des Hostrechners anschließen. Dadurch identifiziert sich das Board gegenüber dem Host als Speichergerät, etwa als Speicherstick. Anschließend wählen Entwickler wie oben erwähnt in Thonny die Option "MicroPython (Raspberry Pi Pico)" als zu installierenden Interpreter, worauf folgender Dialog erscheint:

Klicken Anwender auf den Install-Button, startet die Installation der MicroPython-Firmware. Nach Beendigung der Firmware-Installation müssen Anwender nur noch das Dialogfenster schließen:

Die Firmware besteht aus einem lauffähigen Programm mit der Endung .UF2. Sie lässt sich auch manuell auf den Pico übertragen.
Bereit für alle Schandtaten
Nun sind Host und Pico miteinander verbunden, und Entwickler können entweder über die REPL-Shell direkt mit dem MicroPython-Interpreter arbeiten oder alternativ ein Programm in den Editor eingeben. Wichtig ist an dieser Stelle, dass nach Übertragen eines MicroPython-Programms auf das Board (Endung: .py) das Board erst herunter- und dann wieder hochfährt, worauf das Laufzeitsystem automatisch das Python-Programm ausführt.
Befinden sich allerdings mehrere Programmdateien auf dem Board, weiß der Pico zunächst nicht, welche er ausführen soll. In diesem Fall sucht er nach einer Datei namens main.py, um sie auszuführen oder verharrt regungslos, sollte er diese Datei nicht finden.
Programmieren mit dem MicroPython SDK
Jetzt ist es endlich an der Zeit, ein einfaches MicroPython-Programm zu schreiben, um den Zugriff auf das I/O-System des Boards zu testen. Wie traditionell üblich, soll das erste Programm die interne LED des Pico zum Blinken bringen, bevor wir in nachfolgenden Folgen weitere Möglichkeiten des Pico kennenlernen:

Nun sezieren wir das Programm Schritt für Schritt:
from machine import Pin, Timer
Die import-Anweisung nutzt aus der machine-Bibliothek die Komponenten Pin und Timer. Erstere erlaubt den Zugriff auf die I/O-Ports des Pico, Letztere stellt Funktionen zur zeitlichen Steuerung von Aktionen zur Verfügung. Überhaupt enthält – nomen est omen – machine diverse Komponenten zum Zugriff auf die Pico-Hardware.
onboardLED = Pin(25, Pin.OUT)
Nun erfolgt die Initialisierung der Variablen onboardLED. Sie soll GPIO-Port 25 repräsentieren, an dem sich die eingebaute LED befindet. Wichtig: Die Zahlen beziehen sich nicht auf das physikalische Pin 25, sondern auf den GPIO-Port 25, für den es noch nicht einmal einen physikalischen Pin gibt.

Der zweite Parameter im Konstruktor namens Pin teilt dem Interpreter mit, wie der I/O-Port verwendet werden soll, nämlich im vorliegenden Fall als Ausgabe-Port. Daher die Konfiguration mit Pin.OUT.
timer = Timer()
Hier initialisiert das Programm die Variable timer. Dazu gleich mehr.
def blinker(timer):
onboardLED.toggle()
Die Methode blinker erhält als Argument ein initialisiertes timer-Objekt. Immer wenn der timer dazu die Initiative gibt, erfolgt der Aufruf der toggle-Methode. Die setzt den Ausgang abhängig von deren momentanen Zustand entweder von 0 auf 1 oder von 1 auf 0, was folglich zum Blinken der LED führt.
timer.init(freq = 2.5, mode = Timer.PERIODIC, callback = blinker)
In der Initialisierungsmethode init definiert das Programm einen periodisch feuernden Timer (Timer.PERIODIC) mit einer Frequenz von 2,5. Daraus folgt eine Periode von 400 Millisekunden. timer ruft zu diesem Zweck alle 400 Millisekunden eine Callback-Funktion auf (callback = blinker). In unserem Fall ist das die blinker-Methode, die dementsprechend alle 400 Millisekunden das Ausgangssignal für die LED invertiert.
Gut gesichert
Nach getaner Arbeit können Entwickler entweder für die direkte Programmausführung auf dem Pico sorgen, indem sie auf das grüne Icon oder den entsprechenden Menüpunkt klicken. Oder sie sichern das Programm auf das Pico-Board, worauf das Board resettet, um anschließend mit der Programmausführung zu beginnen. Selbstredend lässt sich die Programmdatei auch auf dem Hostrechner abspeichern:

Wenig überraschend sollte sich jetzt folgendes Geschehen zeigen:

Damit wäre das erste MicroPython für den Raspberry Pi Pico geschafft. Zwar ein triviales Beispiel, aber ein lehrreicher erster Schritt.
Fazit
Dieser Artikel hat sich in seichtem Wasser bewegt. Die Thonny-IDE taugt als ideale Spielwiese, um den Pico interaktiv kennenzulernen. Als professionelle Entwicklungsumgebung kann sie hingegen nicht fungieren. Sie macht allerdings den Einstieg sehr leicht, was schließlich der Sinn des vorliegenden Artikels war. Ich hoffe, Sie haben jetzt noch viel Spaß mit eigenen Experimenten. In den nächsten Teilen wird das Fahrwasser etwas rauer, aber auch unterhaltsamer.
Hilfreiche Referenzen
- MicroPython-SDK für den Raspberry Pi Pico
- Webseite der MicroPython-Erfinder
- Firmware für MicroPython für manuelle Übertragung auf den Pico
