

MIT: "Fin Ray"-Greifer für Softroboter nimmt Gegenstände mit Gefühl auf
Mit einfachen und preisgünstigen Komponenten haben Wissenschaftler des MIT einen "Fin Ray"-Greifer aufgewertet, der damit Schrift auf einem Glas erfühlen kann.
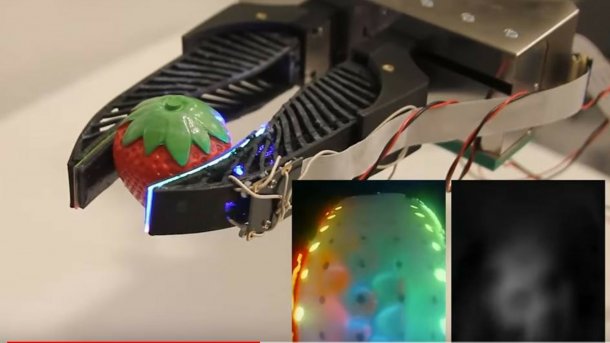
(Bild: Sandra Liu (Screenshot))
Ein Forscherteam der Perceptual Science Group am Computer Science and Artificial Intelligence Laboratory (CSAIL) des Massachusetts Institute of Technology (MIT) hat einen Robotergreifer nach dem "Fin Ray"-Prinzip entwickelt, der zusätzlich eine Sensorik aus kostengünstigen Komponenten umfasst. Er soll aufzunehmende Gegenstände ähnlich gut erfühlen können wie eine menschliche Hand.
Das "Fin Ray"-Prinzip geht auf eine Entdeckung des deutschen Biologen Leif Kniese aus dem Jahr 1997 zurück. Bei seinen Forschungen traf er auf das Phänomen, dass die Schwanzflosse eines Fisches, wenn man gegen sie drückte, sich nicht wegbiegt, sondern einen Druck ausübenden Finger umschließt. Bei Greifern von Softrobotern wird dieser Effekt bereits seit mehreren Jahren genutzt, allerdings fehlt diesen Greifern die notwendige taktile Rückkopplung, um Gegenstände "ertasten" und entsprechend vorsichtig aufnehmen zu können. In dem Paper "GelSight Fin Ray: Incorporating Tactile Sensing into a Soft Compliant Robotic Gripper" beschreibt das Forscherteam rund um Edward Adelson, Professor am CSAIL und der Doktorandin für Maschinenbau Sandra Liu einen "GelSight Fin Ray"-Greifer, der in der Lage ist, sich passiv an verschiedene Formen anzupassen und darüber hinaus mit einer einfachen Sensorik unter anderem Oberflächen erfühlen kann.
Sensorik aus Kamera, LEDs, Gel und Acryl
Der Greifer für Roboter besteht aus zwei Fingern, die nach dem "Fin Ray"-Prinzip aufgebaut sind. Sie stammen aus einem 3D-Drucker und bestehen aus einem flexiblen Kunststoff. Anders als bei herkömmlichen Greifern dieser Art umfassen die Finger des "GelSight Fin Ray"-Greifers über die gesamte Länge quer verlaufende Stützstreben. Im inneren Hohlraum des Fingers haben die Forscher eine Kamera auf einer halbstarren Unterlage sowie Sensoren eingebaut. Bei den Sensoren handelt es sich um Pads aus Silikon-Gel, auf die eine dünne Acrylschicht aufgebracht ist.
Videos by heise
Die Kombination spannt sich über den gesamten Finger hinweg über den Hohlraum auf. LEDs im Inneren beleuchten den Hohlraum, damit die Kamera verwertbare Bilder liefern kann.Trifft ein Finger nun auf ein Objekt und umschließt es durch das "Fin Ray"-Prinzip passiv, dann nimmt die Kamera diese Verformung auf. Mit entsprechenden Algorithmen werden die Bilder ausgewertet. Damit lassen sich die Form des Objekts, seine Oberflächenbeschaffenheit, die Ausrichtung des Objekts im Raum und die vom jeweiligen Finger ausgeübte Kraft bestimmen.
Oberflächenbeschaffenheit erkennen
In ihrem Paper beschreiben die Wissenschaftlerin und der Wissenschaftler ihre Experimente mit einem Greifer, von dem lediglich einer der beiden Finger mit Sensoren ausgestattet worden war. Dieser Greifer konnte verschiedene Gegenstände wie einen kleinen Schraubendreher, eine Kunststoff-Erdbeere, eine Farbtube, einen Ball und Gläser aufnehmen, ohne sie zu beschädigen. Konkret konnte er die Farbtube so anfassen, dass sie nicht gequetscht wurde und Farbe aus der geöffneten Tube lief.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Die Sensorik erwies sich dabei als so empfindlich, dass sogar die Samen einer Fake-Erdbeere erkannt werden konnten. Adelson und Liu bestimmten dazu mithilfe entsprechender Algorithmen die Verformung des Gelkissens. Der GelSight-Sensor war darüber hinaus in der Lage, einen erhabenen Schriftzug auf einem Glas zu erkennen.
Insgesamt konnte der Robotergreifer bei der Handhabung durchsichtiger Gläser überzeugen. Optische Systeme zur Erkennung haben aufgrund der Lichtbrechung hier häufig Probleme. Der taktile Sensor des GelSight-Greifers kann damit jedoch umgehen, wie das Video zeigt. Demnach konnte der Greifer die Position des Glases im Raum bestimmen und das Glas entsprechend bewegt werden, um es sicher absetzen zu können. Der Moment des Aufsetzens auf den Tisch nahm der Greifer ebenfalls über seine Sensorik wahr. Bei sieben von zehn Versuchen klappte das einwandfrei, schreibt das Forscherteam. Auch sei kein Glas bei den Versuchen zerbrochen.

Auch wenn die Experimente mit dem "GelSight Fin Ray"-Greifer erfolgreich verlaufen sind, sehen Adelson und Liu noch Verbesserungspotenzial. So sei der Finger ihres Greifers durch den Hohlraum instabil und könne sich verdrehen. Hier müsse das Design angepasst werden, um das zu vermeiden. Zusätzlich wollen die Forschenden die GelSight-Sensorik anpassen, damit sie auch an anderen Softrobotern verwendet werden kann. Der nächste Schritt sei dann ein Greifer mit drei Fingern. Er soll nach Vorstellung des Forscherteams taktil noch sensibler sein und etwa bei Obst den Reifegrad erfühlen können. Insgesamt sei aber das Ziel erreicht, mit kostengünstigen Komponenten wie Kamera, LEDs, Gel und Acryl ein erschwingliches taktiles Sensor-System für Roboter zu entwickeln, sagt Liu.


(olb)