

Forscher steuern Cyborg-Kakerlake mit Arduinos an
Kakerlaken sollen Missionen etwa bei Katastrophen erfüllen. Dazu muss man sie ansteuern können und macht Cyborgs aus ihnen.
Die Cyborg-Kakerlake wird mit Arduino-Technik angesteuert.
(Bild: Riken CPR)
Ein Team internationaler Wissenschaftler hat unter der Federführung von Forschern des japanischen Riken Cluster for Pioneering Research (CPR) ein Steuermodul auf Arduino-Basis entwickelt, um aus lebenden Kakerlaken fernsteuerbare Cyborgs zu machen. Die notwendige Energie für die Elektronik liefert ein Pufferakku, der von einer kleinen Solarzelle geladen wird. Die Insekten sollen bei der Inspektion gefährlicher Bereiche oder zur Umweltkontrolle eingesetzt werden können, so die Vorstellung der Forscher.
In dem vom Wissenschaftsteam in der Fachzeitschrift npj Flexible Electronics veröffentlichten Paper "Integration of body-mounted ultrasoft organic solar cell on cyborg insects with intact mobility" beschreiben die Forscher, wie sie mit ihrem Rucksackmodul eine Kakerlake fernsteuern. Dabei stand das Wissenschaftsteam vor der Herausforderung, die Insekten über einen längeren Zeitraum ansteuern zu können, um auch längere Missionen durchführen zu können. Deshalb entschied sich das Team unter der Leitung von Kenjiro Fukuda des Riken CPR dazu, die in einem Mini-Rucksack untergebrachte Steuerungselektronik mit Akku von einer Solarzelle speisen zu lassen. Dies soll vermeiden, dass das Insekt zu einer Ladestation zurückkehren muss oder bei Energieverlust "außer Kontrolle" gerät.
Solarmodul zur Energieversorgung
Für ihre Versuche nutzte das Forschungsteam Madagaskar-Kakerlaken, die etwa 6 cm lang sind und damit eine gewisse Oberfläche bieten, um auf dem Rücken Elektronik, Akku und ein 0,004 mm dünnes, organisches Solarmodul aufbringen zu können. Dazu entwickelten die Forscher ein spezielles Haftsystem, das das Solarmodul ohne abzufallen länger auf dem Körper hält und das Insekt in den Bewegungen möglichst wenig einschränkt.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Dies erwies sich als komplizierter als gedacht, denn Teile des Exoskeletts des Insektes überlappen sich, sodass sich der Hinterleib bei der Bewegung verändert. Die Zellen des Solarmoduls wurden deshalb geschichtet teilweise verklebt, teilweise unverklebt aufgebracht, um so Biegsamkeit und Bewegungsfreiheit zu ermöglichen, ohne dass sich das Modul löst.
Die Forscher experimentierten auch mit dickeren Zellen und kompletter Befestigung. Das schränkte die Insekten jedoch so ein, dass sie für das Zurücklegen eine Strecke etwa doppelt so lange benötigten. Zudem konnten sie sich dann nicht mehr selbst aufrichten, wenn sie auf den Rücken gefallen waren.
Videos by heise
Das Solarmodul liefert eine Ausgangsleistung von 17,2 mW, erläutert Fukuda. Das sei 50-mal mehr als das, was derzeit moderne Energiegewinnungsgeräte für lebende Insekten liefern können. Den notwendigen Lithium-Polymer-Akku zur Energiepufferung steckten die Forscher in einen per 3D-Druck aus elastischem Polymer hergestellten "Rucksack". Die Form wurde speziell auf das Insekt angepasst, um die Bewegungsfreiheit möglichst wenig einzuschränken. Nach Angaben des Forscherteams hält der Akku in etwa einen Monat lang stabil an der Kakerlake.
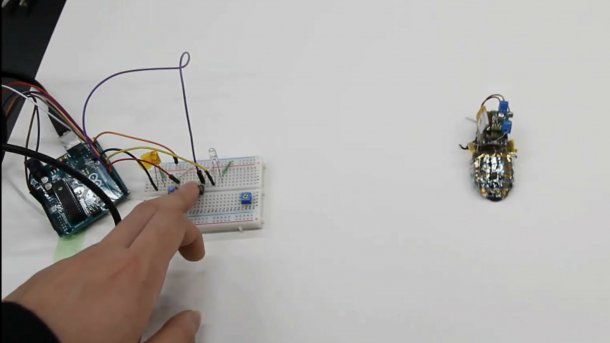
Steuerung per Arduino
Zur Fernsteuerung und zur Stimulation der Beine greift das Team auf Arduino-Technik zurück. Zur Fernsteuerung setzen sie einen Arduino UNO ein, der ein Wireless-Funkmodul NRF24L01+ ansteuert. Damit senden die Forscher Signale für die Steuerung der Kakerlake nach links und rechts. Als Gegenstelle dient das gleiche Modul, das an einem Arduino Pro Mini angeschlossen ist. Der Arduino Pro Mini wertet die Steuersignale aus und stimuliert die Beine der Kakerlake so, dass sie sich nach links oder rechts bewegt.

(Bild: Riken CPR)
Fukuda sieht das leichte und flexible Design des Systems als effektiv zur Ansteuerung von Cyborg-Insekten an. Seiner Ansicht nach könne es in angepasster Form auch bei fliegenden Insekten wie Zikaden oder Käfern angewendet werden.



(olb)