

Researchers develop concept for record-breaking high jump robot
Robots can overcome obstacles continuously or jump over them more quickly. Researchers have designed a particularly energy-efficient robot for this purpose.
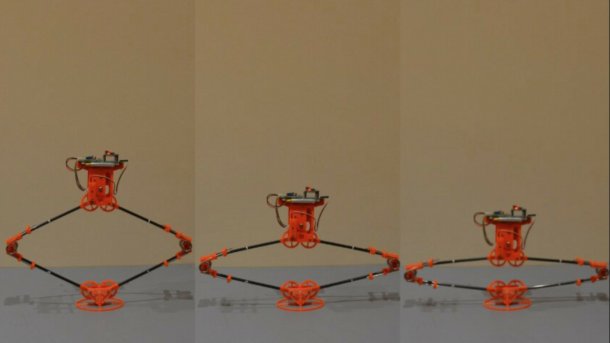
(Image: University of Manchester)
A team of engineers at the University of Manchester has developed a concept for a robot that can jump up to 120 m high. The researchers used a combination of mathematics, computer simulation and laboratory experiments to determine the optimal design.
The best high jump robot can currently jump up to 33 meters. That is about 110 times its own body height. The engineers at the University of Manchester want to top that. Their goal: to build a robot that can jump as high as possible on earth. Its areas of application should be in planetary exploration, use in disaster areas or carrying out surveillance tasks in dangerous areas – i.e. scenarios in which a robot may have to be able to overcome very high obstacles independently.
In the scientific article "Characterizing the take-off dynamics and energy efficiency in spring-driven jumping robots" in the journal Mechanism and Machine Theory, the scientists describe a conceptual design of such a high-jumping robot, which should be able to jump up to 120 m high. The scientists used various methods such as mathematical calculations, computer simulations and experiments on model robots in the laboratory to determine a design that promises the greatest chance of success.
"Robots are traditionally designed to move on wheels or legs, but jumping offers an effective way to move in places where the terrain is very uneven or there are many obstacles, such as in caves, in forests, over boulders or even on the surface of other planets in space," says John Lo, Research Associate in Space Robotics at the University of Manchester and one of the authors of the study. There are a number of challenges that need to be overcome when designing such a robot. First and foremost is improving the performance and energy efficiency of such robots.
Increasing energy efficiency
In their design, the scientists focused on a spring-driven jumping robot and investigated which disadvantages they have to eliminate them. The researchers discovered that such jumping robots often take off before they can even fully release their stored spring energy. This leads to inefficient jumps and results in a lower jump height. In addition, a lot of energy is wasted during these jumps. For example, the robots turn or move sideways instead of moving vertically upwards.
The researchers took these findings into account when designing their construction. They considered several different types, such as a robot with legs for jumping like a kangaroo or a construction with a spring-driven piston. Appearance also played a role to achieve the straightest possible vertical trajectory without twisting. There was a choice of symmetrical shapes, such as a diamond, curved or organic. In the end, the scientists opted for a design with a motor-driven strut.
"Our structural redesigns distribute the mass of the robot components upwards and taper the structure downwards. Lighter legs in the shape of a prism and the use of springs that only stretch are all features that have been proven to improve the performance and, most importantly, the energy efficiency of the jumping robot," says Lo.
The researchers also thought about the size of the robot. Although small robots are light and maneuverable, they cannot develop as much power as robots with larger motors for more powerful jumps. According to the scientists, the optimum version is "somewhere in the middle".
Videos by heise
Concept design in practice
The researchers tested their concept design on a physical model. The robot uses an electric motor to contract a prism-shaped spring strut to store the energy required in the springs for the jump. The stored energy is then immediately released in one piece to unfold the strut. Based on calculations and computer simulations, the scientists assume that this type of robot can jump to heights of around 120 meters. On the moon, with reduced gravity, heights of around 200 m are conceivable.
The researchers at the University of Manchester are now trying to further refine their design. For example, they are working on controlling the direction of the jumps. They also want to use the kinetic energy generated during landing to increase the number of jumps. To be able to use the robot on the moon, the scientists wish to create a more compact and lighter design. This should make the robot more suitable for transportation in a rocket.



(olb)