

Blackpicker: Pick&Place-Automat aus Maker-Komponenten (Teil1)
Seite 5: Elektronik
Trotz anfänglich übersichtlicher Komponentenauswahl wurde das Projekt dann doch sehr umfangreich – dies auch wegen der Verkabelung und dem Anordnen aller Elektronikteile. Alle Steuerungskomponenten wurden in eine Holzschublade zwischen den Verstrebungen unter der Maschine verfrachtet. Diese lässt sich relativ bequem herausziehen, um an die Verkabelung zu gelangen.
Beim Bau solcher Maschinen bleibt man irgendwie immer wieder an der Power-Verteilung hängen. Neben dem 24V/10A-Netzteil für die Schrittmotorversorgung wurde auch ein 5V/6A-Netzteil für die Versorgung des Teensy, Servos, Sensoren und aller peripheren Geräten eingebaut. Leider musste für den Raspberry Pi zusätzlich ein 5V/3A-Steckernetzteil eingebaut werden, da die leichten Spannungsschwankungen auf dem billigen 5V-Böxchen zu groß für einen zuverlässigen Betrieb waren und das Blitz-Symbol doch zu viel auf dem Bildschirm sichtbar wurde.

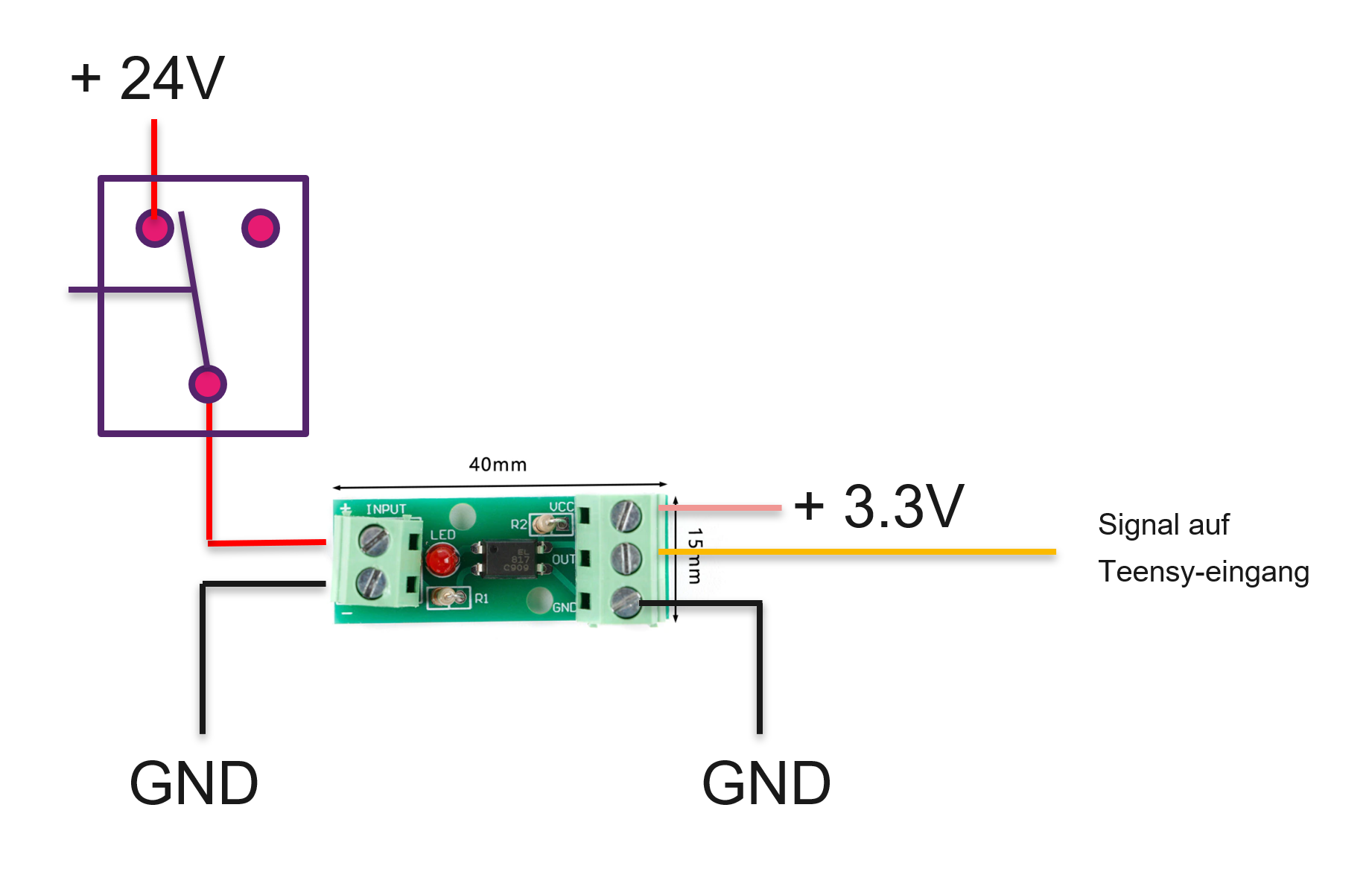
Die ursprüngliche Idee, trendige Endschaltermodule (wie sie für 3D-Drucker verwendet werden) für die Initialisierung der Achsen zu verwenden, musste wieder verworfen werden, da der Einfluss der Schrittmotor-Powerleitungen neben den 5-Volt-Endschalterleitungen in der Kabelschleppkette doch zu groß war. Immer wieder kam es nämlich zu Initfahrten, bei der die Steuerung ein vermeintliches Endschaltersignal auffing und die Motoren zu früh stoppten. Ein neuer Ansatz wurde mit Optokopplermodulen gefunden, die zwischen den Mikrokontrollereingang und den Endschalterausgang gehängt werden konnten. Damit ließen sich neue robuste Endschalter mit 24 Volt betreiben, während gleichzeitig am Eingang des Controllers ein schönes 3,3-Volt-Signal ankam.
Pegelstand
Wie so oft musste auch an anderen Orten mit dem Anpassen von Spannungsleveln jongliert werden. Auch das 5-Volt-Display mit I2C-Eingang wollte zuerst nicht richtig am 3,3-Volt-Teensy. Trotz anfänglichem Recherchieren und ersten Ansätzen von Hacks, konnte das LCD nach dem Finden und Nutzen der richtigen Library (TeensyLCD) und dem Versorgen des Displays mit 5 Volt, statt mit 3,3 Volt auch trotz unterschiedlichen Spannungsleveln einwandfrei in Betrieb genommen werden.
Die Levelshifter-Fee war auch bei der Ansteuerung der 5-Volt-Servos direkt ab 3,3-Volt-PWM aus dem Teensy glücklich und die Servos stellten ihre Positionen ohne Murren ein. Auch die Angst vor den Powerleitungen neben den Servoleitungen im Kabelkanal war nach dem Einsatz von Schirmleitungen unbegründet. Es schien, als dass sich die Effekte für die Servos nicht so dramatisch wie bei den Endschaltern auswirkten. Ein schöner Moment, wie jeder Maker sich vorstellen kann.
Für den Aufbau der Messtation haben wir billige Abstandssensoren mit dem Infrarot-Reflexsensor TCRT5000 verwendet. Die geschickte Anordnung von zwei Sensoren ermöglichte das Detektieren eines großen oder kleinen Loches so wie das Vorhandensein einer Hülse. Was trivial klingt, war im Endeffekt wichtig, um Crashes beim Manipulieren zu vermeiden. Falls nämlich eine Hülse durch irgendwelche Gründe auf der Station liegen bleibt und eine Neue abgelegt werden soll, kann der Greifer crashen.
Zum Thema Störungen bleibt zu sagen, dass im Endeffekt eine geschirmte, einseitig aufgelegte Verkabelung alle Störungen auf ein Minimum (bzw. auf ein für die Maschine akzeptables Niveau) reduziert hat. Dabei haben wir die Kabelschirme aller Signalleitungen (Drahtgeflechte und Folienschirme) bei der Steuerung zusammengeführt und mit Masse verbunden. Dadurch wurde es überhaupt erst möglich, Servosteuerleitungen und Schrittmotorleitungen nebeneinander in der gleichen Schleppkette (30) zu verlegen. Ohne Kabelschirmung ist dies bei dieser Konfiguration praktisch unmöglich, wie auch bereits in anderen Projekten auf schmerzliche Weise erfahren wurde.
Im zweiten Teil behandeln wir die "Machine Vision" mittels OpenCV auf den RasPi, die Kommunikation zwischen Schrittmotorsteuerung und Bilderkennung sowie die Programmierung und Inbetriebnahme. (cm)
