

Blackpicker: Pick&Place-Automat aus Maker-Komponenten (Teil1)
Seite 2: Die Maker-Komponenten
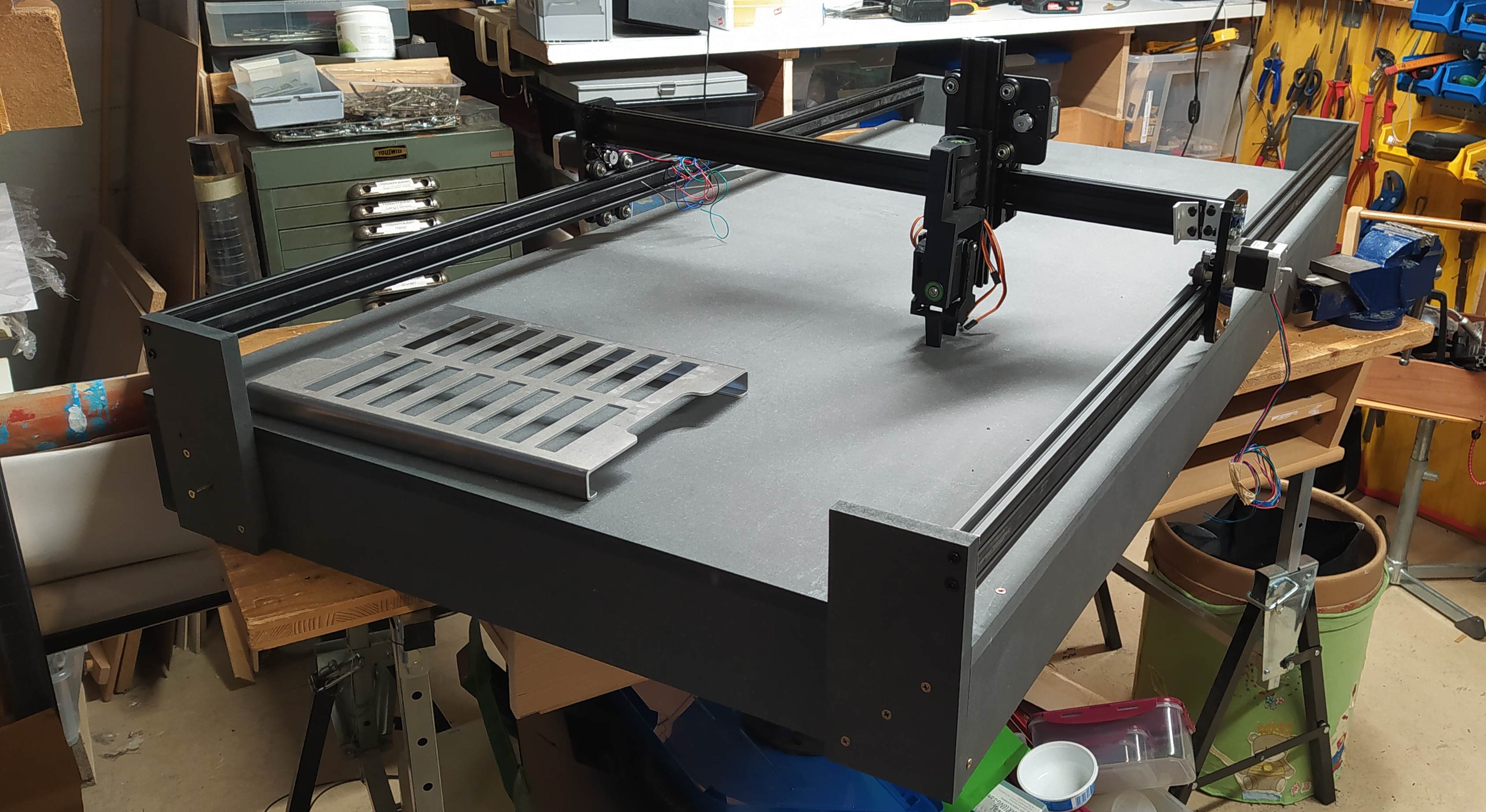
Für einen stabilen Aufbau benötigen Industriemaschinen normalerweise ein gutes Fundament. Dieses besteht in der Regel aus teuren und schweren Profilen und Platten aus Alu oder Stahl oder sogar einem Betonsockel. Um die Kosten hier signifikant zu reduzieren, können Pressspanholzplatten (MDF) verwendet werden. Diese Platten sind formstabil und haben eine plane Oberfläche, sodass ein ziemlich genaues Fundament mit einer Kreissäge geschnitten und zusammengeschraubt werden kann. Damit sich diese Basis nicht verziehen kann, sind Querstreben eingebaut, zwischen denen auch die ausziehbare Elektronik untergebracht ist. Im Baumarkt kann man sich die großen Flächen bei Bedarf auch genau zuschneiden lassen.
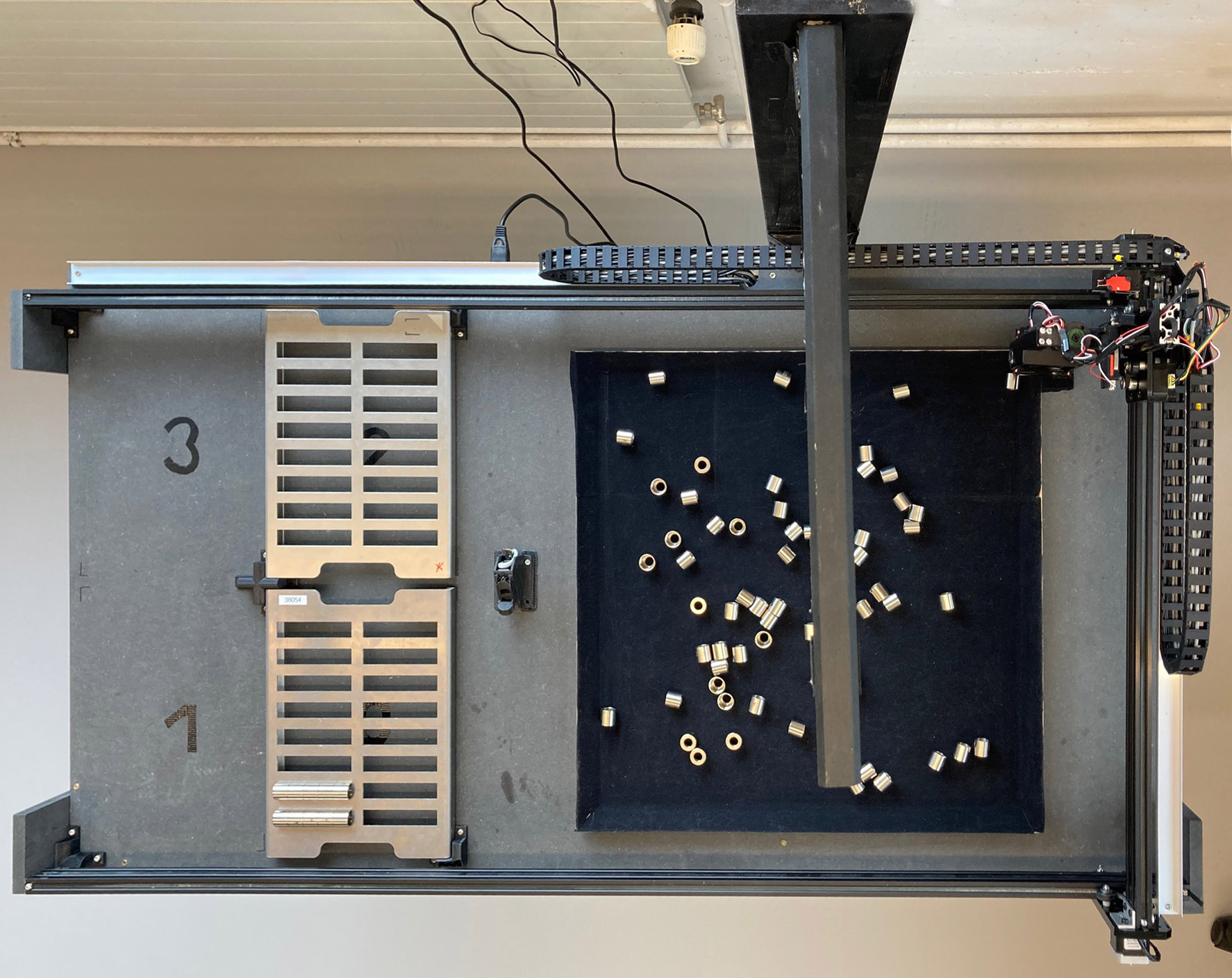
Um die Trackingaufgabe zu vereinfachen, sollen die Hülsen alle ohne Überlappung auf einer Fläche ausgestreut werden. Auch wenn das nicht die Traumlösung ist, so wäre doch die Aufgabe um einiges komplexer, wenn die Hülsen direkt aus einer tiefen Kiste mit wild durcheinander gestapelten Hülsen entnommen werden müssten. Dann wäre nämlich ein 3D-Scanning nötig. So aber muss nur einfach eine Auskleidung des Streubereichs mit Klebeplüschfolie erfolgen (um ein Wegrollen zu verhindern), die Teile lassen sich so mit einer einfachen Pi-Cam erfassen.
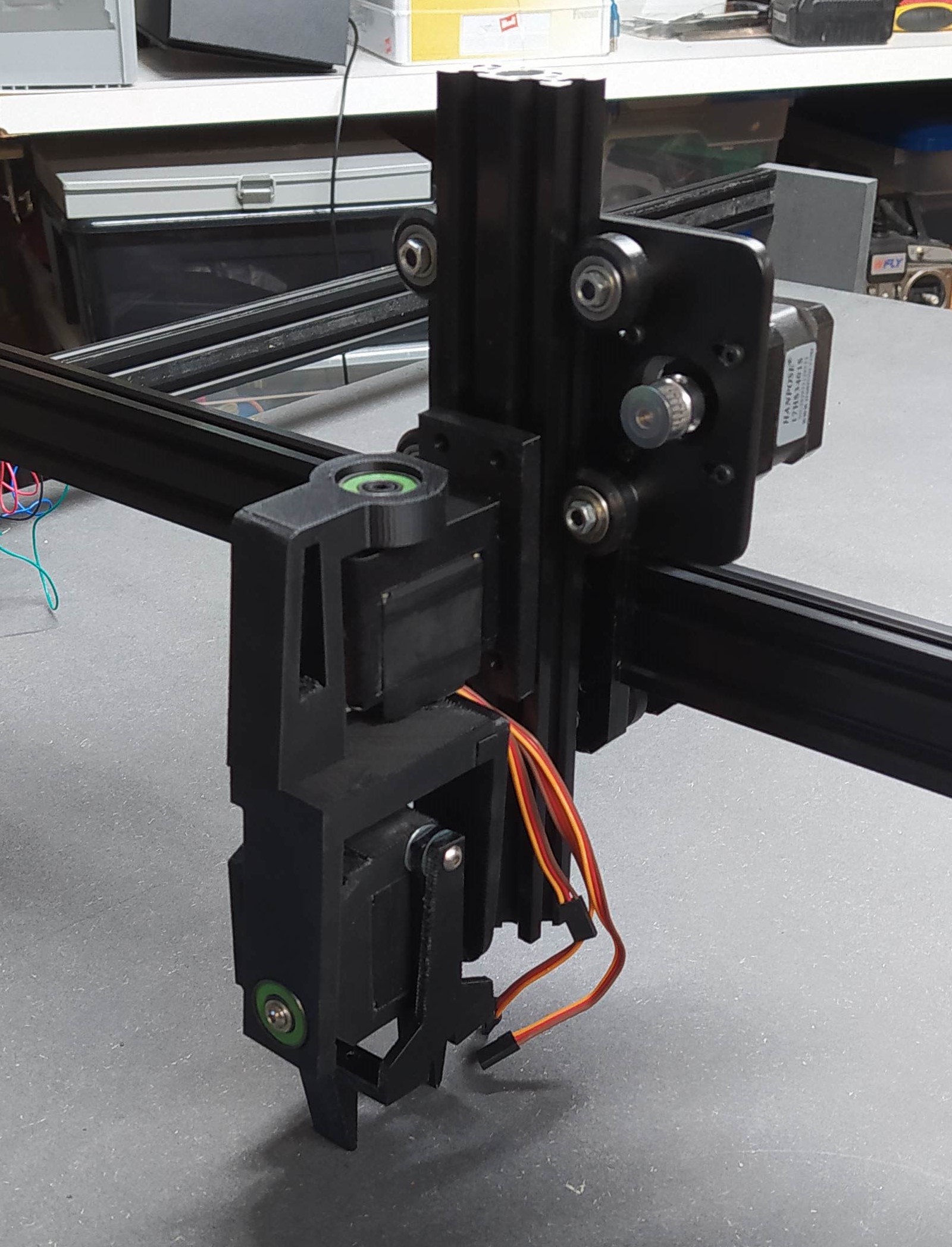
Für den Grundaufbau des XYZ-Portals kamen diverse Lösungen in Frage. Zum Beispiel könnte man den Aufbau einer Shapeoko oder einer Low-cost-Fräse von Aliexpress nehmen, jedoch liegen die Preise auch da noch relativ hoch. Günstiger geht es mit Openbuilds-Profilen. Hier wurde per Zufall ein Lasergravierer auf Aliexpress entdeckt, der Openbuilds-Profile als Linearschienen verwendet und mit 150cm Länge genügend Auslauf für das Projekt bietet. Bestellen kann man ihn auch ohne Elektronikkomponenten, sodass die Kosten mit ca. 350 Euro akzeptabel bleiben. Einzig müssen die Schienen danach auf die gewünschten Längen zugeschnitten werden. Das geht auch ohne grosses Gerät und kann mit einer Stichsäge mit Metallblatt durchgeführt werden. Schön praktisch sind auch die mitgelieferten Schleppketten, die mit 30x15mm genügend Platz für alle Kabel bieten. Für die Z-Achse wurde wiederum ein schönes Modul auf Basis Openbuilds gefunden, welches eine günstige Positionierung des Z-Motors ermöglichte und sich mit ein wenig Anpassung am Laserkopf montieren ließ.

Mit der Streulösung für die zu sortierenden Teile war ein Kompromiss unausweichlich: Die Kamera kann die Ausrichtung des Lochs bei liegenden Hülsen von oben nicht erfassen, daher müssen die liegenden Teile auf eine "Messstation" mit Sensoren zur Erfassung der Ausrichtung gelegt werden. Im Endeffekt musste jedoch jedes Teil auf diese Station abgelegt und durchgemessen werden, da der Greifer bedingt durch Reflektionen auf den Teilen diese nur mit begrenzter Genauigkeit aufnehmen konnte. Dieser leichte Off-Grip kann auf der Station ausgeglichen werden.
Die größte Herausforderung bezüglich Materialbeschaffung stellte der Greifer dar. Wir konnten weder auf Thingiverse noch auf anderen gängigen Portalen (grabcad, openbuilds etc.) geeignete Greifer finden, die auf kompakten Massen eine Rotation in zwei Richtungen unterstützen. Daher musste hier eine Eigenentwicklung her.
Auf der Seite der Elektronik bietet sich für das Erfassen und Erkennen der Objekte ein Minicomputer wie der Raspberry Pi 4 mit Kamera an. Dabei wurde ein angsteinflößend langes 15-Pin-Flachband-Kamerakabel (150cm) an den Kameraport angeschlossen, um die Kamera auch gut positionieren zu können. Nach anfänglichen Bedenken lief diese Lösung aber einwandfrei, obwohl das Kabel gefährlich nahe an den Powerleitungen der Schrittmotoren vorbeigeführt werden musste. Nach ersten positiven Versuchen mit CNC Shields und Arduino Megas wurde schlussendlich dann doch ein Teensy 3.6 für die Maschinensteuerung auserkoren.
Narrensicher
Was immer wieder leicht vergessen wird, wenn man als Entwickler einen neuen Aufbau fertigstellt, sind die Bedienelemente für Nicht-Techniker. Hierzu gehört natürlich ein LCD-Display, dass in diesem Falle mit 4 Zeilen auskommen muss. Natürlich wäre ein entsprechender Monitor am Raspberry Pi ebenfalls möglich gewesen, jedoch böte so eine Lösung weniger direkte Interaktion mit der Steuerung und würde eine aufwändigere Kommunikation zwischen Pi und Steuerung erfordern. Dazu wäre die Ausarbeitung eines schönen und bediensicheren GUIs dazugekommen. Nicht zu vergessen sind die Elemente zur Bedienung der wichtigsten Funktionen (Multischalter für Teileart Auswahl und alle Buttons) und der wichtigsten unwichtigen Funktion: Not-Aus.

