

So groß wie ein Salzkorn: Kleinster Roboter mit Fernsteuerung
Erstmals kann ein Mikrosystem ferngesteuert und berührungslos mit Energie versorgt werden. Licht und Ladebucht sind ebenfalls schon an Bord.
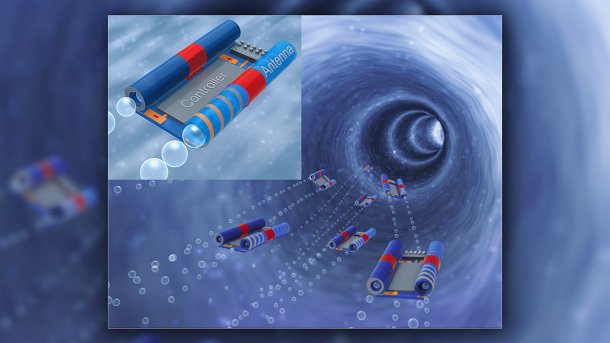
Die Mikro-Roboter sind nur so groß wie ein Salzkorn, lassen sich aber trotzdem fernsteuern.
(Bild: Leibniz IFW Dresden)
- Wolfgang Richter
Dass Geduld auch heute noch zu den Ingenieurstugenden zählt, beweisen die Fahrzeuge, die seit Kurzem unter dem Mikroskop von Oliver G. Schmidt ihre Bahnen ziehen. Die kleinsten mikroelektronischen Roboter der Welt sind nur 0,8 Millimeter lang. Sie schwimmen in einer Wasserstoffperoxid-Lösung und werden angetrieben durch den Rückstoß von kleinen Sauerstoffbläschen, die bei der Zerlegung von Wasserstoffperoxid in Sauerstoff und Wasser entstehen. Bereits vor zehn Jahren hatte der Physikprofessor an der TU Chemnitz mit diesem Prinzip einen Eintrag ins "Guinness-Buch der Rekorde" erzielt – für den kleinsten von Menschenhand gefertigten Düsenantrieb.

"Schon damals war mir klar, dass es dauern würde, bis wir das Antriebskonzept in einen Mikroroboter integrieren können", erzählt Schmidt. Und noch weitere zehn Jahre werde es vermutlich dauern, bis er in medizinischen oder industriellen Anwendungen zum Einsatz kommen könnte. "Ein Patent auf den Roboter zu beantragen, habe ich aufgrund der langen Entwicklungszeit gleich verworfen", sagt Schmidt und lacht. Schon heute hat das Gerät allerdings zwei anwendungsnahe Features an Bord: eine Infrarot-Leuchtdiode und eine Ladefläche, die geöffnet und verschlossen werden kann.
Videos by heise
Die internationale Community der Mikroingenieure ist daher auch ziemlich begeistert. So blubbern die metallisch schimmernden, doppelstrahligen Gefährte auf der Titelseite der Fachzeitschrift "Nature Electronics". Und Wei Gao, Professor für Medical Engineering am renommierten California Institute of Technology, der nicht an dem Projekt beteiligt war, bestätigt auf Nachfrage, dass die neuen Roboter zukünftig eine entscheidende Rolle bei der Verabreichung von Medikamenten, der Biosensorik und bei Mikrooperationen direkt im Körper spielen könnten.
Roboter-Entwicklung mit Hindernissen
Wie hat das Forscherteam, zu dem auch Wissenschaftler des Leibniz-Instituts für Festkörper- und Werkstoffforschung in Dresden gehören, diesen Roboter in Salzkorngröße hergestellt? "Eigentlich benutzen wir Standardverfahren aus der Chipherstellung", sagt Schmidt. Dazu gehören das Aufdampfen von Metallen und die Fotolithografie, bei der das Material durch Masken hindurch belichtet wird. Die belichteten Stellen bilden dann die gewünschte Struktur, die Umgebung wird durch ein Lösungsmittel entfernt. Würden die Roboter aber aus dem für Mikrochips verwendeten Silizium gefertigt, wären sie starr und könnten sich im Körper nicht flexibel an Engstellen anpassen. Die Forscher wählten daher als Grundlage Schichten von Polymeren, die sie strukturierten und auf die sie anschließend dünne Metallfilme auftrugen. "Wir mussten alle Prozessschritte an die neuen Materialien anpassen, das hat das Ganze so schwierig gemacht", sagt Schmidt.


Hinzu kamen einige ingenieurwissenschaftliche Tricks. So werden die beiden Düsen rechts und links an der Roboter-Plattform durch die Polymerschichten selbst gebildet – indem sie sich an den Rändern einfach etwas aufrollen. In einem bestimmten Fabrikationsschritt quillt die eine Schicht durch die Aufnahme eines Lösungsmittels auf, die andere aber nicht. Es entsteht eine mechanische Spannung zwischen beiden Schichten, die zum Aufrollen führt – wie bei alten Farbschichten, bevor sie abblättern. Vorher haben die Forscher genau an diesen Stellen Platin aufgedampft, das später in den Düsen als Katalysator das Wasserstoffperoxid zerlegt und die Sauerstoffbläschen erzeugt.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Das Herzstück des Roboters aber liegt zwischen den Düsen. Eine Spule kann hier von außen Energie empfangen, und zwar über ein sich änderndes Magnetfeld. Solch eine induktive Kopplung wird zum Beispiel auch beim berührungslosen Aufladen eines Smartphones benutzt. Das System ist also nicht auf die Versorgung durch eine Batterie angewiesen.
Heizelemente zur Steuerung
Auf eine ähnlich clevere Weise lässt sich das Fahrzeug auch steuern. Die Forscher haben dafür die Fläche der Katalysatoren in den Düsen unterschiedlich groß gewählt. Damit werden in der einen Düse mehr Bläschen erzeugt als in der anderen – der Roboter würde sich dadurch eigentlich ständig drehen. Die Mikroingenieure haben aber an der schwächeren Düse mit dem kleineren Katalysator ein zusätzliches Heizelement angebracht, das dort die Temperatur und damit die katalytische Reaktion erhöhen kann. Der Strom für das Heizelement kommt von der Spule. Nun kann man durch die induktive Energieübertragung den Roboter steuern: Bei schwacher Energieübertragung dreht er sich zur einen Seite, bei mittlerer Stärke hebt das Heizelement gerade den Nachteil der schwächeren Düse auf, und der Roboter fährt geradeaus, bei hoher Intensität dreht er sich zur anderen Seite.
Um einzelne Mikroroboter in einem Schwarm gezielt anzusteuern, sei es möglich, die Spulen auf charakteristische Frequenzen abzustimmen, erklärt Schmidt. Das würde auch im Abstand von zwanzig Zentimetern noch gut funktionieren, sei also für Roboter im Körper geeignet.
Natürlich ist Schmidt sich bewusst, dass ein Mikro-roboter, der für seinen Antrieb auf Wasserstoffperoxid angewiesen ist, für medizinische Anwendungen nicht taugt. "Aber Katalysatoren könnten ja auch andere chemische Reaktionen begünstigen", sagt er. "Man könnte zusammen mit den Robotern eine salzhaltige Lösung spritzen und dann per Elektrolyse Gasbläschen erzeugen. Oder man benutzt statt der metallischen Katalysatoren Schichten, auf denen Enzyme sitzen. Die könnten dann die Glukose im Blut in einer Reaktion umsetzen, bei der ebenfalls Gasbläschen entstehen."
Güterbeförderung durch Mikro-Bot
Auch die "Ladeklappe" des Roboters lässt sich fernsteuern. In einem temperaturempfindlichen Polymer sind dazu nanometerdünne Schichten aus Eisen und Gold eingearbeitet. Schaltet man ein zweites, äußeres Magnetfeld an, erzeugt es dort Wirbelströme, die das Metall und damit auch das Polymer erwärmen – wodurch es sich zusammenzieht und den Laderaum freigibt. Die Forscher konnten so einen Golddraht als Frachtgut aufnehmen und sicher an einen anderen Ort befördern.
Selbst für eine Standortbestimmung des Roboters wurden schon die Grundlagen gelegt. Über die Spule wird nämlich auch eine Infrarot-Leuchtdiode mit Strom versorgt. In einer zukünftigen Anwendung könnte diese Infrarotstrahlung durch die Haut hindurch leuchten. (wst)
