

MIT: Roboterhand erkennt Objekte mit einem Griff
Menschliche Hände "erkennen" ein Objekt erst nach mehrmaligem Erfühlen. Eine Roboterhand des MIT schafft dies auf einen Griff.
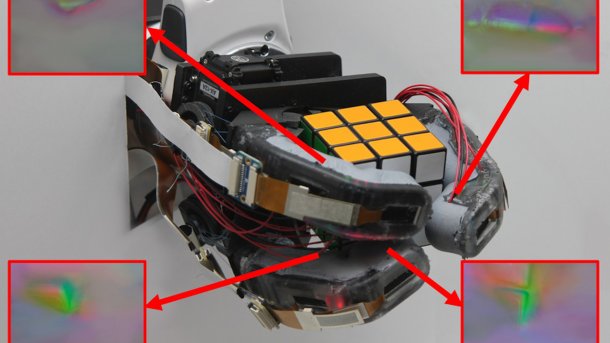
Die Roboterhand des MIT erkennt einen Zauberwürfel.
(Bild: MIT)
Wissenschaftler des Massachusetts Institute of Technology (MIT) haben eine künstliche Hand entworfen, die der menschlichen Hand in gewisser Weise noch überlegen ist. Die Roboterhand kann auf einen Griff das Objekt erkennen, das sie gerade aufgenommen hat.
Gemeinhin sind bei Roboterhänden Sensoren mit hoher Leistung in den Fingerspitzen untergebracht. Objekte können dadurch nur ertastet werden, wenn es vollständig mit den Sensoren in Kontakt war. Dadurch muss die Roboterhand mehrfach das Objekt greifen. Andere Ansätze haben zwar Sensoren mit geringer Auflösung über den ganzen Finger hinweg eingebaut, können dadurch allerdings nicht so viele Details erfassen, sodass das Objekt durch mehrfaches Umgreifen durch die Hand wandern muss.
Fühlen auf einen Griff
Das Wissenschaftsteam des MIT hat nun hochauflösende Sensorik über die gesamte Fläche ihrer drei-fingerigen Roboterhand eingebaut, wie aus dem wissenschaftlichen Paper "A Soft Endoskeleton Hand with Continuous High-Resolution Tactile Sensing" hervorgeht, das auf Arxiv veröffentlicht ist. Die Arbeit soll im Detail auf der Robotik-Konferenz RoboSoft 2023 vorgestellt werden, die vom 3. bis 8. April in Singapur stattfindet.
Videos by heise
Die Hand verfügt über ein starres 3D-gedrucktes Endoskelett, das von einer weichen Silikonhaut umgeben ist. Zwei der Finger sind Y-förmig ausgeführt, der dritte Finger als Daumen in entgegengesetzter Richtung. Die Finger sind leicht gekrümmt und ähneln damit menschlichen Fingern. Die Haut ist so angepasst worden, dass sie ohne Befestigungselemente oder Klebstoffe hält. Unter der transparenten Haut befinden sich über die ganze Länge der Finger Sensoren. Kameras und LEDs als Beleuchtung erfassen visuell Informationen über die Form eines gegriffenen Objekts. Dabei liefern alle drei Finger zugleich Daten über das Objekt. Die Daten werden dann ausgewertet und einem Objekt zugeordnet.
"Es ist sehr wichtig, dass jede Hand sowohl weiche als auch starre Elemente hat, aber auch, dass sie in der Lage ist, einen großen Bereich abzutasten, vor allem, wenn wir sehr komplizierte Manipulationsaufgaben durchführen wollen, wie es unsere eigenen Hände tun können. Unser Ziel bei dieser Arbeit war es, all die Dinge, die unsere menschlichen Hände so gut machen, in einem Roboterfinger zu vereinen, der Aufgaben übernehmen kann, die andere Roboterfinger derzeit nicht bewältigen können", sagt Sandra Liu, Studentin im Fachbereich Maschinenbau und Mitautorin der Studie.

(Bild: MIT)
Hohe Erkennungsgenauigkeit
Der Roboterhand gelang es, Objekte mit nur einem Griff mit einer Genauigkeit von 85 Prozent zu erkennen. Das starre Skelett macht es möglich, dass auch schwere Objekte gegriffen werden können. Dabei können dank der weichen Außenhaut auch empfindlichere Objekte wie etwa Plastikwasserflaschen aufgenommen werden. Die Roboterhand eigne sich dadurch besonders für Pflegeroboter, die schwere Gegenstände heben können, zugleich aber so feinfühlig sind, dass sie einer pflegebedürftigen Person etwa beim Baden helfen können.
Die Forschenden beabsichtigen in einem nächsten Schritt, die Roboterhand um eine Handfläche mit Sensorik zu ergänzen. Davon erhoffen sich die Wissenschaftler, die taktilen Unterscheidungen noch weiter zu verbessern. Zusätzlich soll die Abnutzung des Silikons verringert und der Daumen mit weiteren Funktionen ausgestattet werden, damit die Hand ein breiteres Anwendungsspektrum erfüllen kann.



(olb)