

eSkateboard mit VESC-Speedcontroller
Mit dem Hochstromregler VESC verpassen wir einem Skateboard mit Elektromotor eine feinfühlige Steuerung mit 3D-gedrucktem Gehäuse. Außerdem bauen wir einen Nunchuck mit zwei Arduino Nanos und Funkmodulen zur passenden Fernbedienung um.

- Roman Radtke
"Kraft ist nichts ohne Kontrolle", hieß es einst in einer Pirelli-Werbung mit Leichtathlet Carl Lewis und es stimmt. Dies trifft auch auf das motorisierte Skateboard zu, das wir in Ausgabe 4/17 der Make gebaut haben. Es hat an den Hinterrädern Brushless-Motoren mit Speedcontrollern und eine Fernbedienung. Die Leistung des Boards ist gewaltig, ebenso die Beschleunigung. Das Fahren macht es daher besonders für Anfänger schwierig. Abhilfe schafft ein spezieller Speedcontroller für eSkateboards den wir neu einbauen und dabei auch die Fernbedienung durch einen arduino-basierten Eigenbau in einem Nunchuk ersetzen. Den Empfänger und Controller schützen wir schließlich mit einem Gehäuse aus dem 3D-Drucker.

Der „Vedder Electronic Speed Controller“ (VESC) von Benjamin Vedder ist quasi der „Goldstandard“ für die Regelung von Antriebsmotoren elektrischer Longboards und ähnlicher „Fahrzeuge“. Das Open-Source-Projekt umfasst neben dem Controller die Software BLDC-Tool, das auf Windows, OS X und Ubuntu läuft. Dank einer recht intuitiven Benutzeroberfläche und umfangreichen Einstellungsmöglichkeiten ist der VESC optimal geeignet, um unser Board zu zähmen.
Was ist ein ESC?
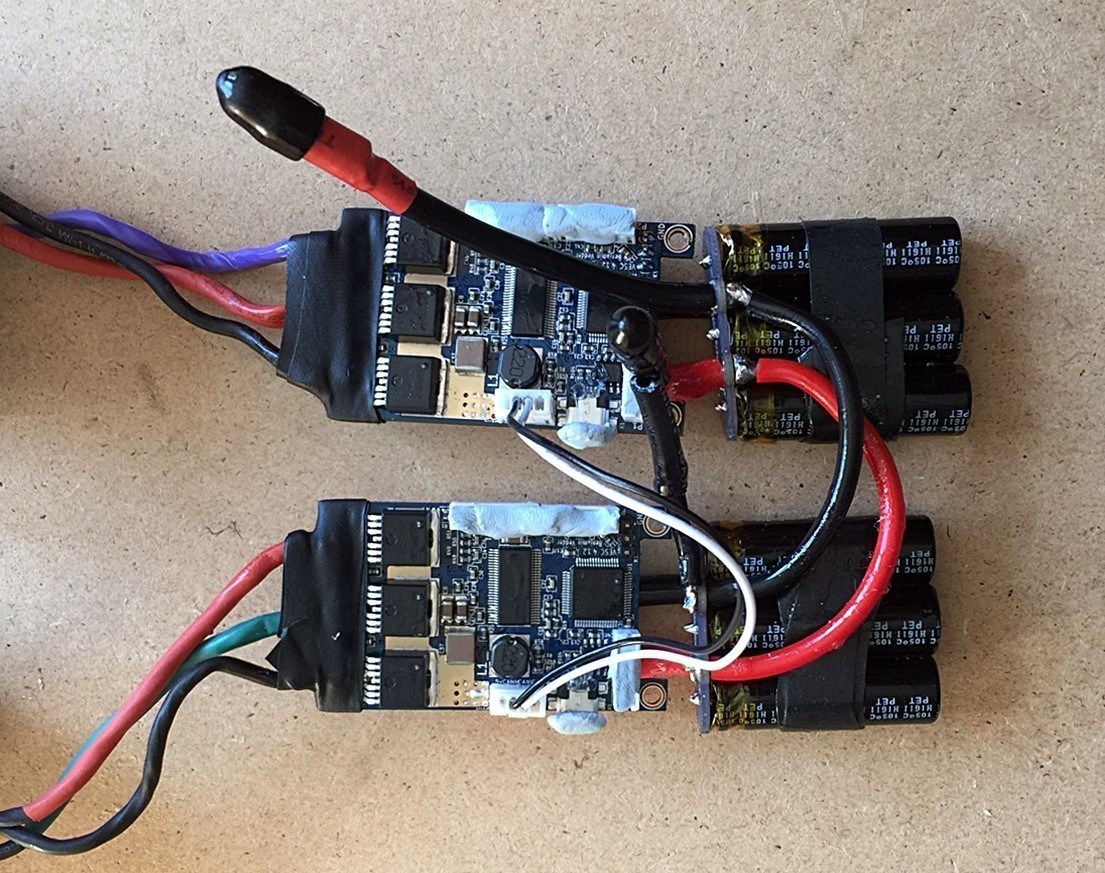
Bei den wartungsarmen Brushless-Motoren erfolgt die Kommutierung des magnetischen Feldes nicht mechanisch durch Kohlebürsten, sondern elektronisch durch spezielle Motorregler. Sie werden auch Fahrtenregler oder Electronic Speed Controller (ESC) genannt.
In den Reglern steuert meist ein Mikroprozessor oder spezieller Chip leistungsstarke Feldeffekttransistoren (FETs), die synchron zum gewünschten magnetischen Drehfeld des Motors durchgeschaltet werden und Strom durch die jeweiligen Spulen des Motors schicken.
Im Gegensatz zu klassischen bipolaren Transistoren sind FETs spannungsgesteuert und können bei niedrigen Frequenzen praktisch leistungslos angesteuert werden. Es wird lediglich eine Steuerspannung benötigt. Für den Einsatz in Motorreglern sind sie somit prädestiniert.
Longboard-Controller VESC
Den VESC hat Benjamin Vedder speziell für die Verwendung in der Elektromobilität entwickelt und optimiert, womit er auch für andere Projekte im Modellbau oder Robotik geeignet ist. Der Betriebsspannungsbereich ist mit 8 bis 60 Volt für einen ESC in dieser Baugröße (ca. 40 mm × 60 mm) recht hoch und lässt einen sicheren Betrieb mit bis zu 12-zelligen LiPo-Akkus zu.
Die kontinuierliche Strombelastbarkeit liegt bei 50 Ampere, kurzzeitig sind bis zu 240 A möglich. Da der Regler mit bis zu 60 Volt arbeiten kann, lassen sich prinzipiell Motoren dauerhaft mit 3 kWatt ansteuern – das sollte ebenfalls für die meisten Projekte reichen. Ungewöhnlich für einen Regler mit derartig hohem Eingangsspannungsbereich ist die Integration eines BECs (Battery Eliminator Circuit) mit 5 Volt. Er liefert Strom von bis zu 1 A und kann so ziemlich jede zusätzliche Elektronik versorgen.
Dank niederohmiger, schneller FETs kann der VESC je nach Einsatzzweck weitgehend ohne Kühlung betrieben werden. Ein weiterer Vorteil gegenüber Modellbau-Reglern ist, dass der Fahrer mit dem VESC regenerativ bremsen kann. Die kinetische Energie von Board und Fahrer wird beim Bremsen durch Nutzung der Motoren als Generatoren wieder in elektrische Energie umgewandelt.
Positionsbestimmung
Besonderes Augenmerk wurde auf ein möglichst großes Anfahrmoment, also gute Performance bei niedrigen Geschwindigkeiten gelegt – auch bei der Verwendung von Motoren ohne Positionssensor. Positionssensoren (meist die berührungslosen Hall-Sensoren) erfassen die Position des Rotors, sodass der Motorregler bereits im Stand das Feld kommutieren kann. Ohne Sensor „fliegt“ der Regler sonst „blind“.
Die Rotorposition bestimmt der VESC durch Messung der Spannung, die durch die elektromagnetische Gegenkraft, auf Englisch back EMF (back electromotive force) entsteht. Diese wiederum entsteht durch die Drehung des Rotors und wirkt der angelegten Spannung entgegen. Sie kann durch einen AD-Wandler vom Mikrocontroller erfasst werden. Wenn der Motor sich dreht, ohne angetrieben zu werden, wird die generierte Spannung an allen Phasen kontinuierlich gemessen, sodass der Regler zu jeder Zeit weiß, wo sich der Rotor befindet und wie schnell er sich bewegt. Dies ermöglicht einen besonders sanften Übergang vom Rollen zum angetriebenen Fahren.
