Copiloten
Das Lenken ferngesteuerter Flugapparate ist in den letzten Jahren dank moderner Elektronik zum Kinderspiel geworden. RC-Flugzeuge kehren bei einem Steuerfehler automatisch zurück in eine stabile Fluglage. Multicopter stehen in der Luft und fliegen per GPS vorprogrammierte Routen ab, um danach automatisch zum Startplatz zurückzukehren und zu landen. Wir geben eine Einführung in die Technik der Flightcontroller und eine Übersicht aktueller Modelle.
Flightcontroller sind keine neue Erfindung, in Kampfjets etwa stabilisieren sie seit Jahrzehnten deren Lage. In inhärent instabilen Systemen wie Multicoptern sind Flightcontroller ebenfalls unverzichtbar, da es dem menschlichen Piloten nicht möglich ist, drei oder mehr Motoren gleichzeitig so präzise zu steuern, dass der Copter kontrolliert fliegt. Starrflügelflugzeuge, wie zum Beispiel Hochdeckerflugzeuge à la Cessna, fliegen prinzipiell eigenstabil, doch auch hier sind die Flightcontroller auf dem Vormarsch! Dank ausgefeilter Sensorik lassen sich sowohl Copter als auch Starrflügler im Fehlerfall – und sei dieser ein Pilotenfehler – oft in eine sichere Fluglage zurückbringen.
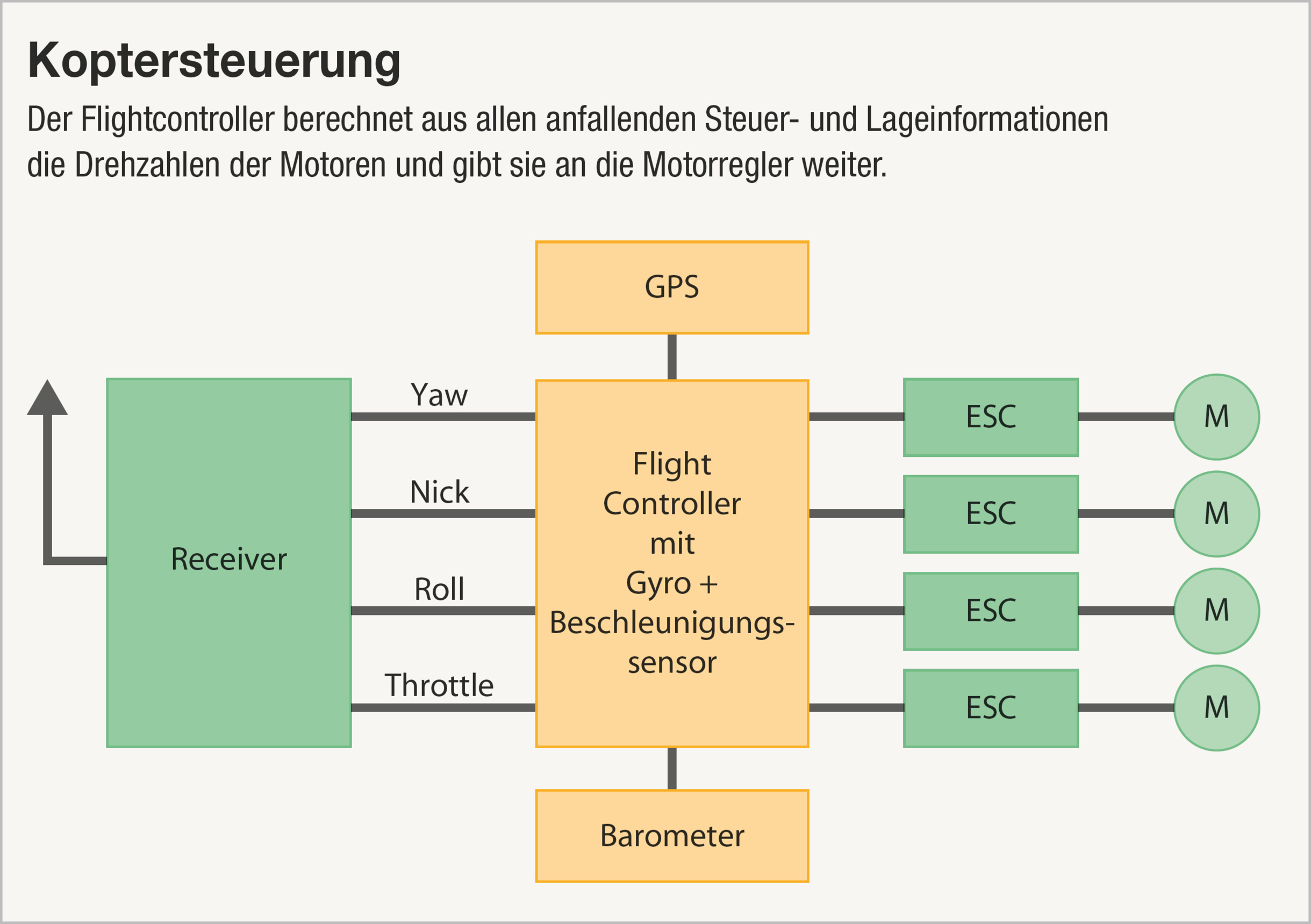
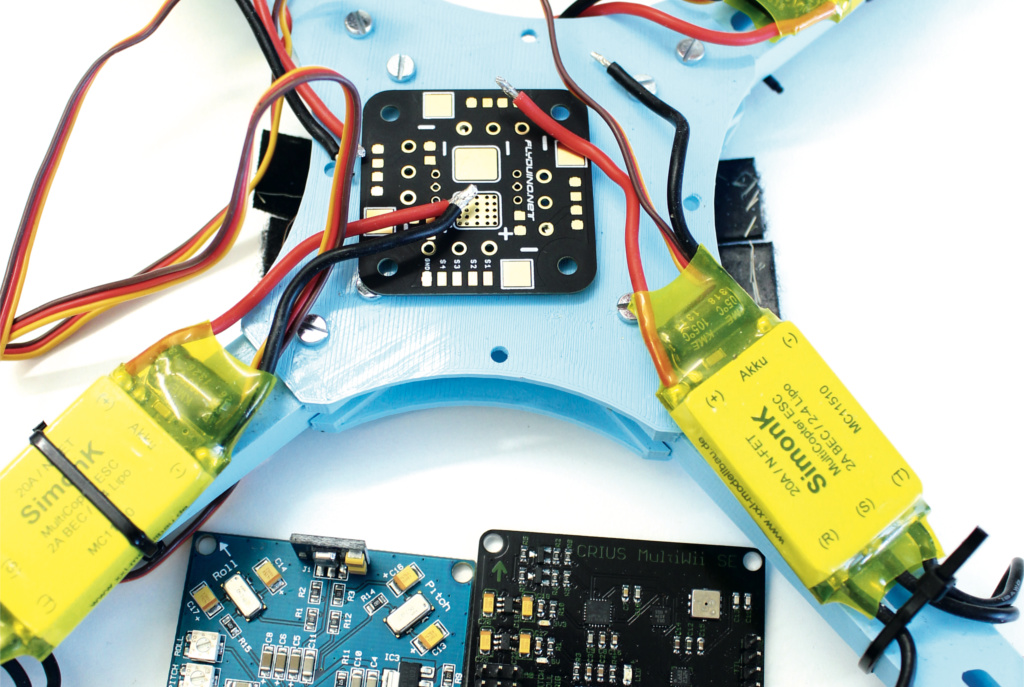
Hardcore-Bastler haben die Technik teils mit erheblichen Kosten vor Jahren in die Modellfliegerei überführt. Mittlerweile sind Flightcontroller massentauglich und vor allem erschwinglich, wozu die Miniaturisierung der Elektronik und die bessere und vor allem günstigere Verfügbarkeit von Lagesensoren beitrug. Doch die Sensoren selbst können noch lange keine „Drohne“ kontrollieren. Hierzu müssen ihre Daten erst mit den Steuerbefehlen des Nutzers sinnvoll kombiniert werden, um damit beispielsweise die vier Rotoren eines Quadrocopters zu steuern. Für diese Aufgabe ist ein sogenannter Flightcontroller, kurz „FC“, zuständig. Es handelt sich meist um eine kleine Platine, auf der die Sensoren und mindestens ein Microcontroller verbaut sind.