
Staubsaugerroboter
Ob sie den Boden säubern oder die Katze beschäftigen – Staubsaugerroboter sollen unser Leben erleichtern. Im c’t-Test 2011 schlug sich dieser Roboter allerdings nicht sehr gut. Nach dem Öffnen des Gehäuses war klar, warum das so ist.
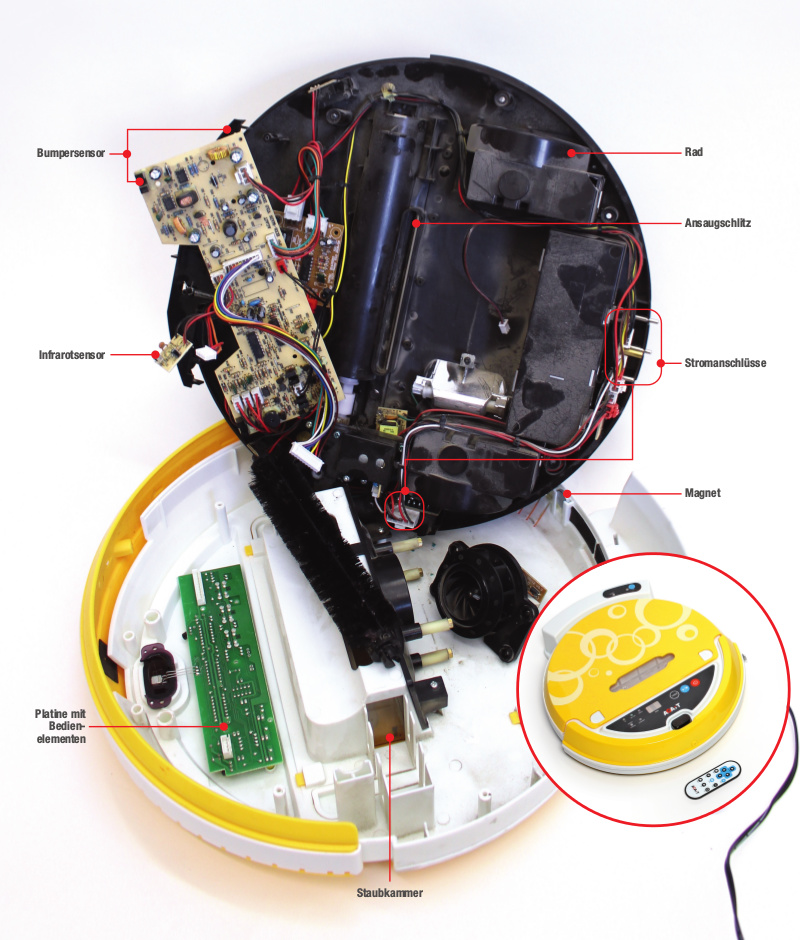
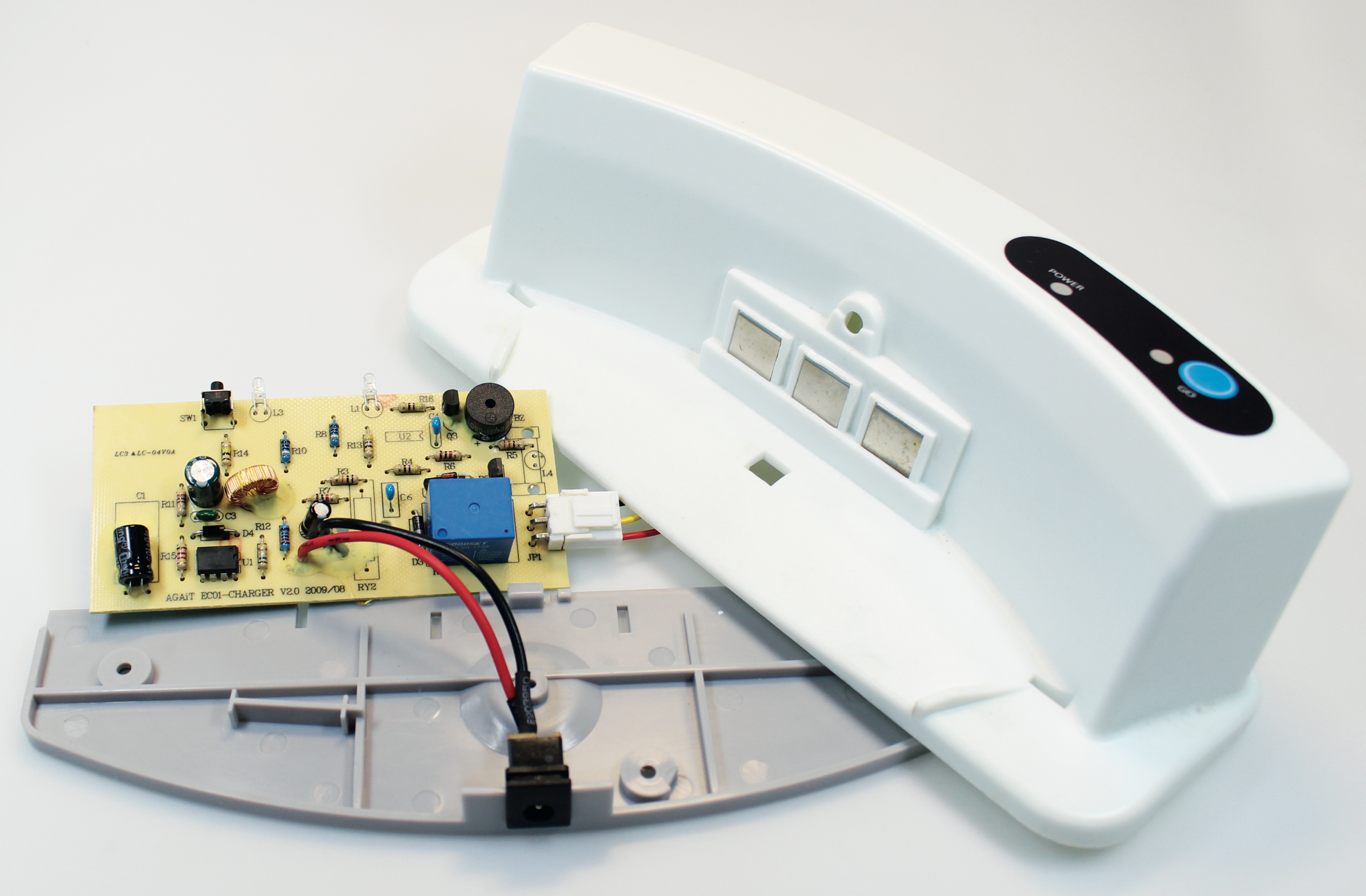
Als die c’t-Redaktion vor kurzem aufräumte, haben wir uns einen Staubsaugerroboter geschnappt, der 2011 getestet wurde. Damals schnitt der AGAiT eher schlecht ab. Inzwischen ist er gar nicht mehr zu gebrauchen, denn der Akku hat aufgegeben. Also haben wir den runden Gefährten aufgeschraubt. Der Anblick der diskret aufgebauten Schaltung ohne jegliche Mikrocontroller hat uns etwas überrascht, allerdings erklärt das vermutlich das Testergebnis.

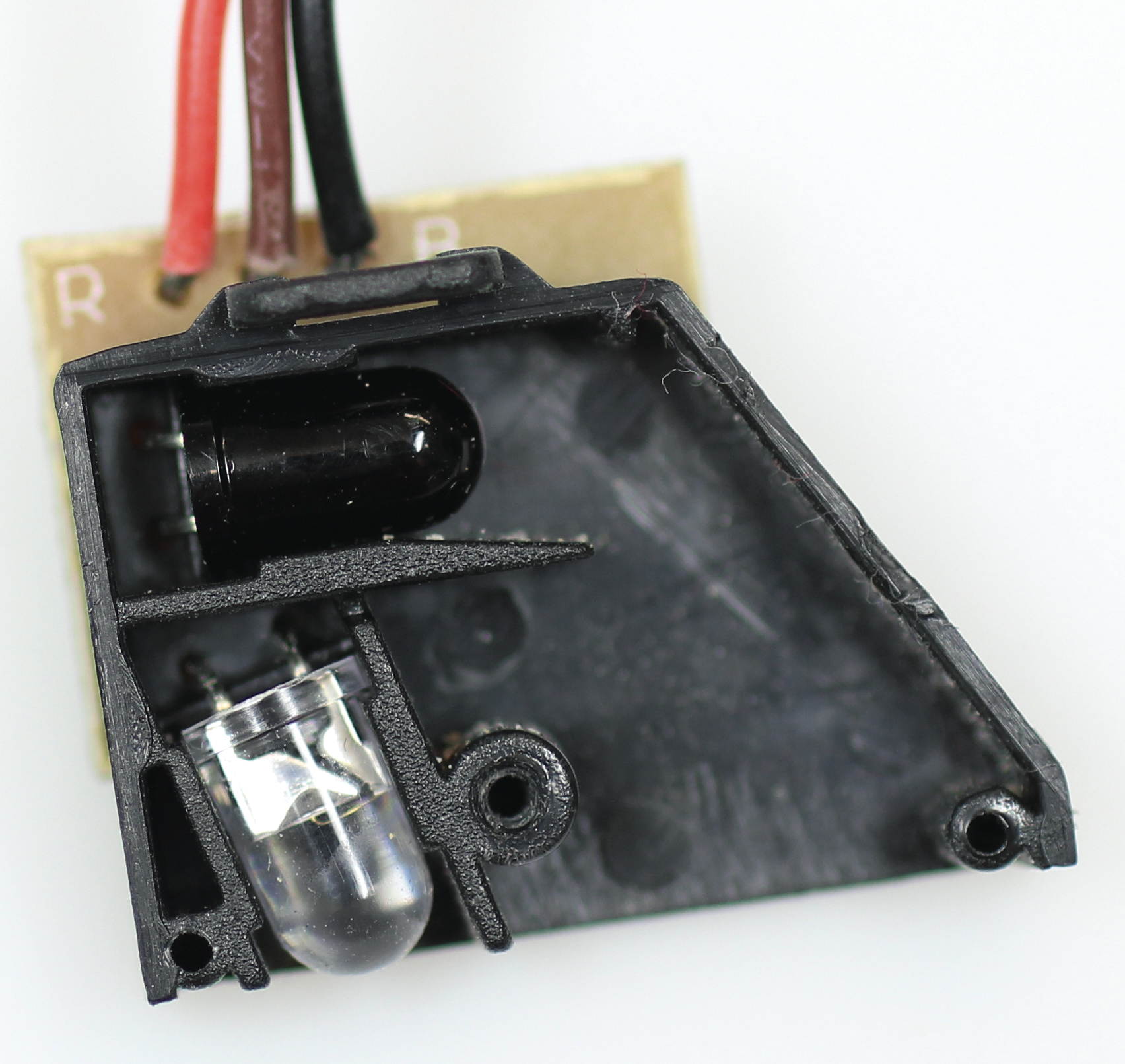
Auch die Ausstattung mit Sensoren ist mager. Die Kombination von Infrarot-LED und Photodiode ist in drei verschiedenen Ausführungen verbaut, um Hindernisse und Abgründe zu erkennen sowie die Ladestation anzusteuern. Die LEDs emittieren Infrarotlicht, das von der Umgebung zurückgeworfen wird. Die reflektierten Strahlen erkennt jeweils die Diode, die durch ihre schwarze Färbung nur auf Infrarot reagiert. Das gleiche Prinzip nutzt unser analoger Roboter aus dem letzten Heft.
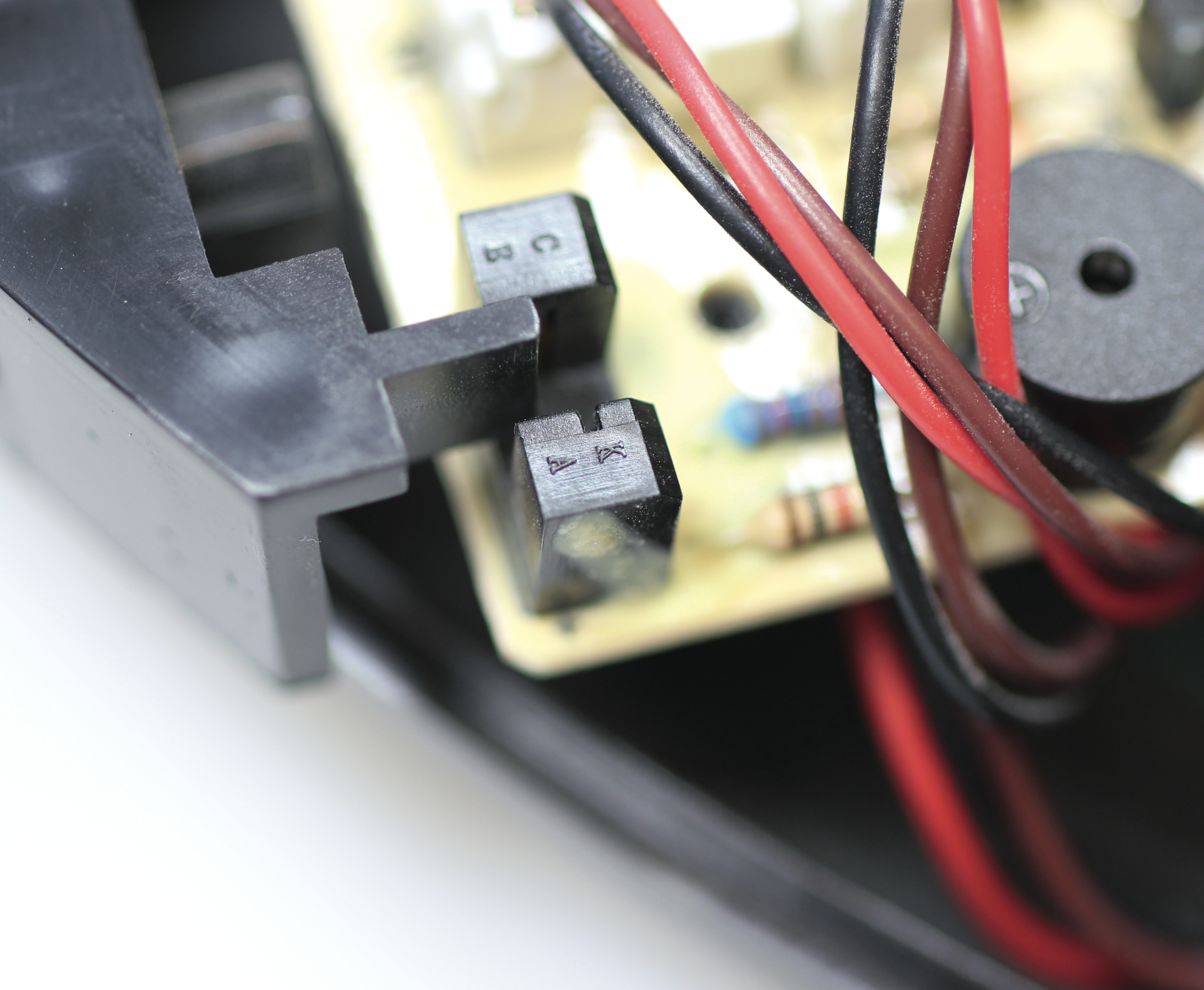
Zwei Gabellichtschranken sitzen hinter dem Bumper und reagieren, wenn der Roboter gegen ein Hindernis stößt. Vorn und an den Seiten gibt es drei weitere Sensoren, die auf den Boden gerichtet sind. Mit einer weiteren Photodiode erkennt der Roboter den Infrarotstrahl der Ladestation, um sie anzusteuern. Kurz vor dem Andocken dreht er sich um 180 Grad und nutzt die kleine Photodiode über den hinteren Ladekontakten.
Insgesamt sind vier Gleichstrommotoren im Roboter verbaut: zwei treiben die beiden Räder an. Ein weiterer lässt über ein paar Zahnräder die beiden Bürsten gleichzeitig rotieren. Die lange Bürste hängt direkt vor dem Einzug, während eine zweite am Rand sitzt. Der letzte Motor saugt Luft und Dreck an.
Ansonsten hat der Staubsaugerroboter noch eine Platine, die mit LEDs und einer Sieben-Segment-Anzeige seinen Status ausgibt und über Taster bedient werden kann. Zum Laden kann man das Netzteil entweder direkt an den Roboter anschließen oder er fährt an die Ladestation. —hch