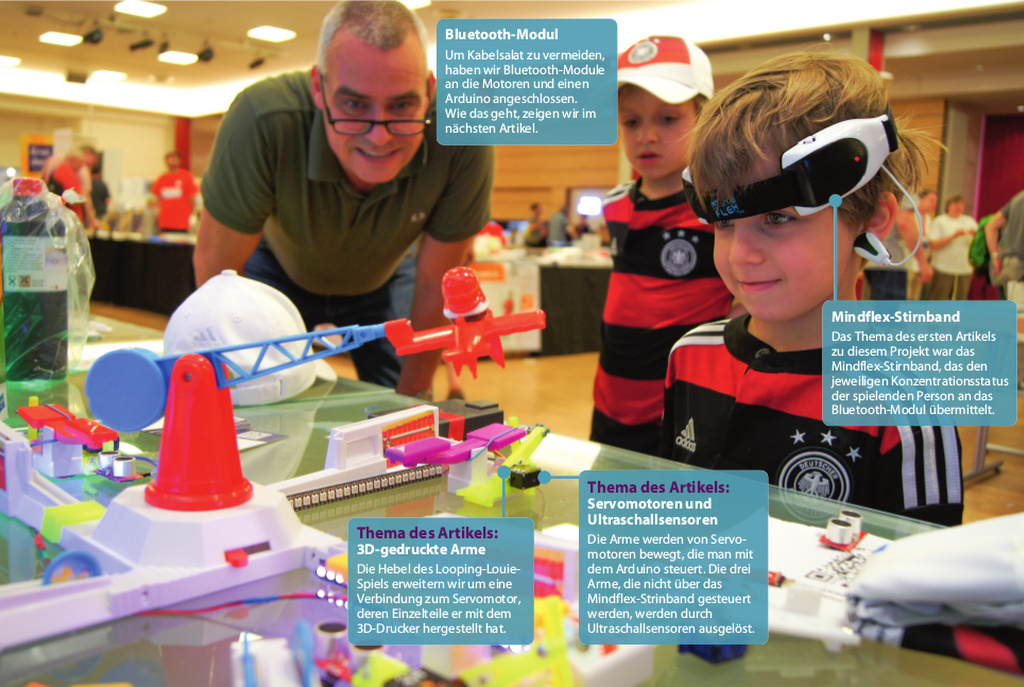
Der Hochleistungsbastler Mario Lukas hat die zwei Kinderspiele Looping Louie und Mindflex miteinander verbunden und so ein „gedankengesteuertes Looping Louie“ erfunden. Im zweiten Teil unserer Artikelreihe zu diesem Bastelprojekt zeigen wir, wie man das Looping-Louie-Spiel automatisiert. Mit diesem einfachen Projekt kann man sich in die Themen 3D-Druck und die Steuerung von Servomotoren und Ultraschallsensoren mit Arduino einarbeiten.
von Elke Schick und Mario Lukas
In der letzten Ausgabe haben wir gezeigt, wie man das Mindflex-Stirnband an einen Arduino anschließt und die Daten auswertet. Damit haben wir veranschaulicht, wie man Gedankensteuerung – oder genauer das Auslesen der elektrischen Aktivität des Gehirns – in eigene Elektronikprojekte einbinden kann. In diesem Artikel widmen wir uns der Automatisierung des Looping-Louie-Spiels. Denn wenn man die manuelle Bedienung des Spiels durch Gehirnsteuerung ersetzt, reicht es nicht, nur die Signale des Mindflex-Stirnbands auszuwerten. Zusätzlich muss man einen Mechanismus bauen, der die Hebel des Looping-Louie-Spiels automatisch auslöst. Und damit auch die drei Hebel, die nicht über das Mindflex-Stirnband gesteuert werden, mitspielen können, haben wir sie mit Ultraschallsensoren ausgestattet, die ein Signal ausgeben, wenn sich das in der Mitte rotierende Flugzeug nähert.
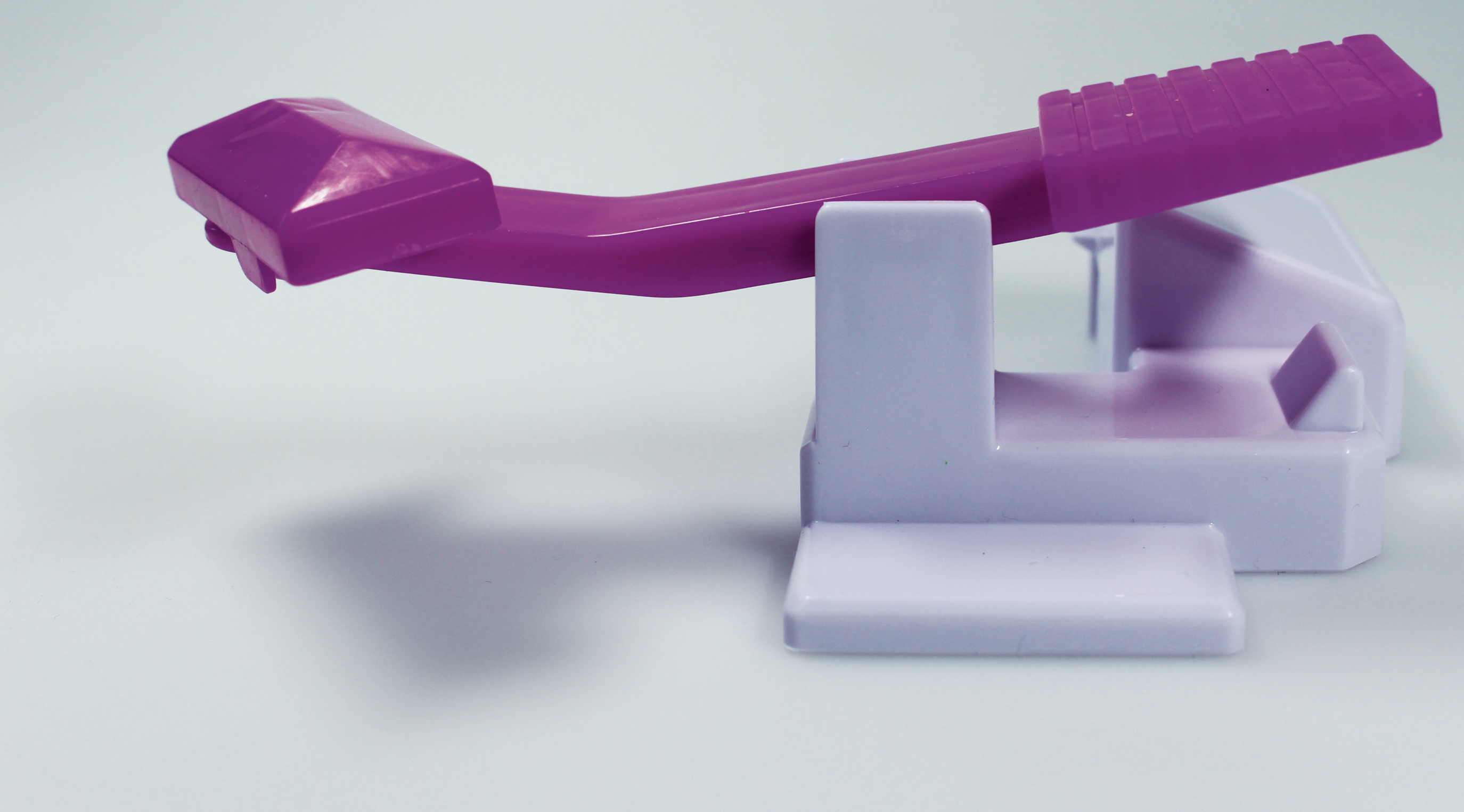
Ein Looping-Louie-Hebel, wie er bei dem Spiel mitgeliefert wird. Die einfache Mechanik – das breite geriffelte Ende wird mit einem Finger heruntergedrückt – haben wir mit einem Servo, mehreren Hebeln, einem Gummiband und zum Teil Bewegungssensoren erweitert.
Zu diesem Zweck haben wir den Hebel – oder die Wippe, wie es in der Looping-Louie-Terminologie korrekt heißt – mit einem Servomotor verbunden. Diese Motoren sind weit verbreitet und werden zum Beispiel auch häufig für die Gelenke von Roboterarmen oder ganzen Robotern verwendet. Servos bestehen aus einem Drehmotor und mehreren Zahnrädern in einem Gehäuse und man kann sie recht leicht mit Mikrocontrollern ansteuern. Die Position des Motors wird durch Pulsweitenmodulation (PWM) gesteuert. Bei der PWM wird die Länge eines Impulses, also die Dauer eines aktiven Signals, verändert. Durch unterschiedlich lange Impulse stellt sich der Motor also in eine bestimmte Position. Dabei gelten Rahmenbedingungen: Bei einem Impuls vom 1 ms Länge dreht sich der Servo zum linken Anschlag, bei 2 ms zum rechten Anschlag, bei 1,5 ms nimmt er die Mittel- oder Ruheposition ein.