Raketen-Nachtlicht
Einmal mit der Rakete durch unendliche Weiten fliegen – mit diesem Nachtlicht aus dem 3D-Drucker. Es hat einen Stecker zum direkten Einstecken in eine Steckdose, verschiedene Lichteffekte, die von einem Arduino kontrolliert werden, Touch-Sensoren zur Steuerung und einen Piezo-Summer für Feedback.
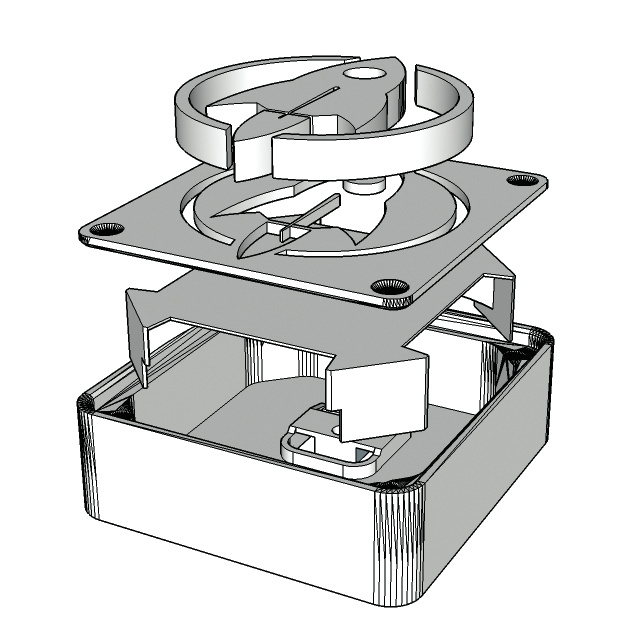
Die Inspiration für ein Nachtlicht habe ich von Thingiverse (Projektnummer #905142). In dem Projekt wird eine Lichterkette verbaut und deren Stromversorgung von außen zugeführt. Für mich sollte es jedoch ein Nachtlicht werden, das direkt in eine Steckdose gesteckt werden kann. Dafür habe ich das ursprüngliche Design in der 3D-Modelling-Software Sketchup überarbeitet. Die Gehäuseschale bot außerdem nicht genug Platz für die benötigte Elektronik (Netzteil, Arduino Micro Pro, Piezo-Buzzer). Die dafür notwendige Streckung auf der Z-Achse war schnell durchgeführt. Um den Stecker des Steckernetzteils an der Rückwand befestigen zu können, war ein längerer Konstruktionsprozess nötig – inklusive einiger Testdrucke. Schließlich rastete der Stecker-Adapter zufriedenstellend in der Schale ein. Die Trafo-Elektronik stammt aus einem anderen Standard-Steckernetzteil, das ich mit einem Dremel aufgefräst habe. Anschließend habe ich den Trafo an den Stecker in der Schale gelötet. Die Kontaktpunkte am Stecker sind aus Edelstahl – ohne Lötwasser ist das nicht zu löten.

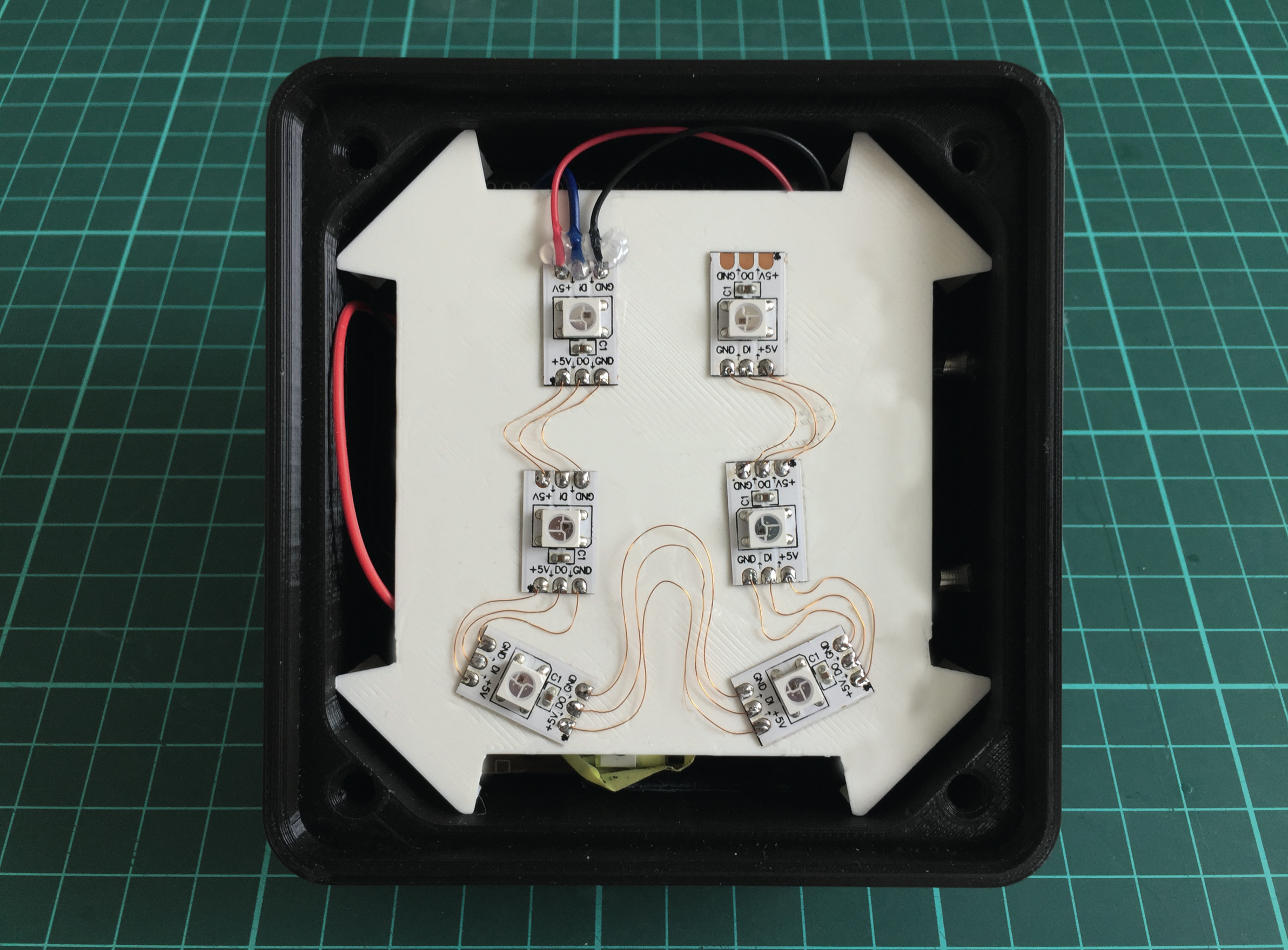
Zur Befestigung der LEDs habe ich einen Halter entworfen, der in die Schale eingesteckt wird. Die sechs WS2812B-RGB-LEDs sind miteinander über Kupferkabel verlötet und werden auf den Halter geklebt. Mit der ADCTouch-Library für den Arduino lassen sich mit ein paar Zeilen Code äußerst zuverlässige, kapazitive Touch-Sensoren bauen. Dabei ist keinerlei Zusatzhardware nötig. Es genügen zwei einfache Drähte, die mit Metallkontakten verlötet und im rechten Teil des Gehäuses befestigt werden. Da die LEDs im wesentlichen punktförmig abstrahlen, braucht das Licht noch einen Diffusor. Je nach Anwendung kommen weißes Papier, mattes Acrylglas oder Ripstop infrage. Häufig hat sich ganz simples Butterbrotpapier als sehr guter Diffusor bewiesen. So auch bei diesem Projekt. Es wird doppellagig auf die Rückseite des Deckels geklebt. Für die Steuerung der LEDs verwende ich die FastLED-Library. Damit lassen sich in vergleichsweise kurzer Zeit tolle Lichteffekte erzeugen. Die vollständige Software ist über die Projektseite verfügbar. —hch