

Picaxe-Projekt: Bürstenroboter Borsti selber bauen und per Fernbedienung steuern
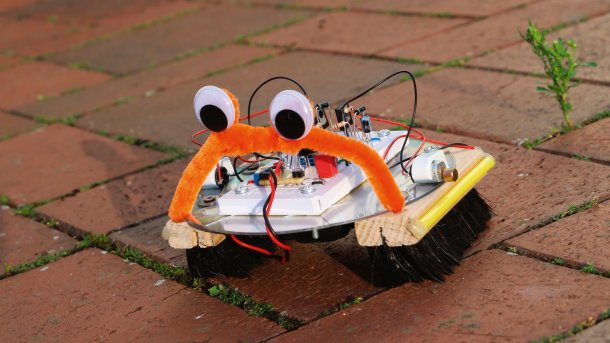
Aus einer alten Schuhbürste und einer CD bauen wir Borsti. Wo der kleine Roboter hinfährt, steuern wir mit einer TV-Fernbedienung.
- Fritjof Flechsig
Die Geschichte von Borsti beginnt mit einem Besuch auf der Maker Faire 2014 in Hannover. Ich war auf der Suche nach Projektideen für meine Elektronik-AG an einem hannoverschen Gymnasium. Da fand ich auf dem Stand des "Arbeitskreises Amateurfunk und Telekommunikation in der Schule" einen kleinen Roboter, der sich mit Vibrationsmotoren auf einer Schuhbürste fortbewegt. Er passt perfekt in unser Konzept, denn unsere AG führt Schülerinnen und Schüler ab Klasse 6 mit einfachen Mitteln an moderne Elektronik heran.
Eine Kernidee: Bauteile muss man in die Hand nehmen, um eine Intuition zu entwickeln, was mit ihnen möglich ist und was nicht. Eine Grundplatine mit Steuerung gibt es beim Arbeitskreis käuflich zu erwerben – wir bauten jedoch unsere eigene Version. Unser Borsti bekam einen Körper aus einer CD, eine Steuerung auf einem kleinen Steckbrett und zwei Bürstenbeine. Er kann vorwärtsfahren, nach rechts und links lenken und dabei blinken sowie bremsen, sogar mit einer Bremsleuchte. Das alles wird ferngesteuert mit einer alten Sony-Infrarot-Fernbedienung für den Fernseher.
Das Gehirn für Borsti musste für Schüler verständlich programmierbar sein und keine komplizierten und teuren Adapter benötigen. Die Wahl fiel daher schnell auf einen Picaxe, allerdings nicht auf den bekannten Typ 08M2, sondern den etwas größeren 14M2. Um alle gewünschten Bauteile anzuschließen, benötigen wir fünf Ausgänge und einen Eingang und damit einen Ausgang mehr, als der 08M2 zur Verfügung stellt. Außerdem brauchen wir zwei Vibrationsmotoren, die wir über Pulsweitenmodulation steuern – am 08M2 ist die Funktion nur an einem Pin verfügbar.
Das war die Leseprobe unseres heise-Plus-Artikels "Picaxe-Projekt: Bürstenroboter Borsti selber bauen und per Fernbedienung steuern". Mit einem heise-Plus-Abo können Sie den ganzen Artikel lesen.