

Telepräsenz-Roboter mit teilautonomer Steuerung
Wer sich nicht bewegen kann, ist vielleicht froh, wenn er einen Roboter losschicken kann, um etwas nachzusehen oder mit anderen zu kommunizieren. Mit einem neuen Steuerungskonzept soll das einfacher werden.
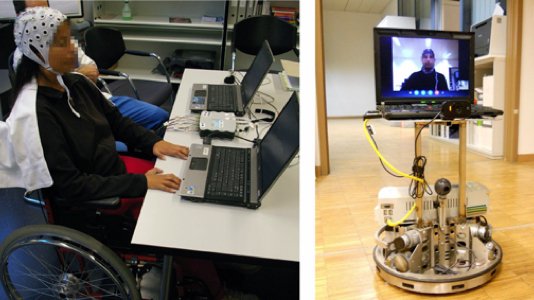
Über eine Reihe von EEG-Sensoren lässt sich der Telepräsenz-Roboter steuern, indem sich der Nutzer Bewegungen mit seinen Füßen oder Händen vorstellt.
- Sascha Mattke
Ein neues Steuerungskonzept könnte Menschen mit schweren motorischen Einschränkungen mehr Unabhängigkeit geben: Italienische und Schweizer Forscher haben einen experimentellen Telepräsenz-Roboter entwickelt, der zum Teil von eigenen Algorithmen gesteuert wird und zum Teil von Gedanken des Nutzers. Über ein Headset, das Gehirnwellen detektiert, lässt der Nutzer den Roboter wissen, wohin er sich bewegen soll. Um Details wie das Vermeiden von Hindernissen und das Bestimmen der besten Route kümmert sich die Maschine dann selbst, berichtet Technology Review.
Im Wesentlichen handelt es sich bei dem Roboter um ein auf einem Rollgestell befestigtes Laptop. Der Nutzer sieht sein Umfeld über die Webcam des Geräts und kann über Skype mit anderen Menschen kommunizieren. Um den Roboter zu steuern, trägt er eine Kappe mit einer Reihe von EEG-Sensoren und stellt sich Bewegungen mit seinen Füßen oder Händen vor. Jede Bewegung entspricht einem anderen Kommando, also etwa vorwärts, rückwärts, links oder rechts. Software übersetzt die unterschiedlichen Anweisungen in Aktionen für den Roboter.
Getestet haben die Forscher ihren Roboter, indem sie ihn von Menschen mit und ohne Behinderung durch mehrere Räume voller Hindernisse navigieren ließen. Beide Gruppen legten den Kurs in ähnlichen Zeiten zurück, und zwar mit weniger einzelnen Anweisungen und schneller als bei einer Komplettsteuerung. Bei den nicht-behinderten Teilnehmern wurde auch getestet, wie schnell sie den Roboter ohne jedes Autonomie-Element mit der Hand steuern konnten. Wie sich zeigte, ging das nur wenig schneller als die Steuerung mit gemeinsamer Kontrolle und Hirn-Computer-Schnittstelle.
(sma)
