

Astrobee: Zwei autonome Roboterwürfel für die ISS
Am Mittwoch sollen zwei würfelförmige Roboter zur ISS fliegen, die den Astronauten Aufgaben abnehmen sollen. Sie sollen gesteuert werden und autonom agieren.
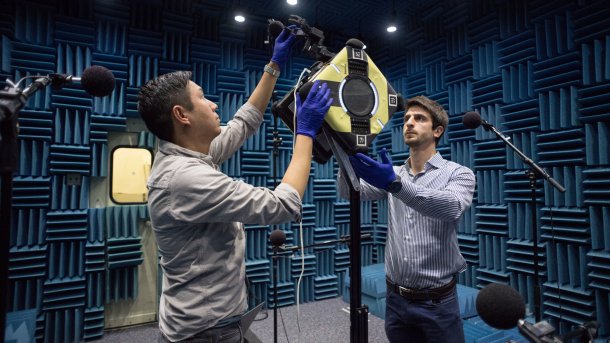
Der Astrobee Honey bei Vorbereitungen auf der Erde
(Bild: NASA)
Mit dem unbemannten Raumtransporter Cygnus sollen am heutigen Mittwoch zwei autonome Roboterwürfel zur Internationalen Raumstation ISS gebracht werden. Die Astrobee können selbstständig arbeiten oder von der Erde aus gesteuert werden, um Experimente durchzuführen, den Astronauten zu helfen und der Bodenkontrolle als "Augen und Ohren" zu dienen, erklärt die NASA.
Außerdem sollen sie neue Möglichkeiten für Experimente und das Risiko für die Astronauten senken. Die Roboter bauen auf den Vorgängern SPHERES (Synchronized Position Hold, Engage, Reorient, Experimental Satellites) auf, die seit 2006 auf der ISS im Einsatz sind.

(Bild: NASA/International Space Station Expedition 14)
Helfer auf der ISS
Die beiden Roboterwürfel, die nun starten sollen, wurden Honey ("Honig") und Bumble ("Hummel") getauft, berichtet IEEE Spectrum. Der dritte namens Queen ("Königin") soll später im Jahr folgen. Sie sind in verschiedenen Farben gehalten, damit sie unterschieden werden können. Die Roboter sind jeweils Würfel mit Kantenlängen von 30 Zentimeter und können sich dank gezielt umgeleiteten Luftströmen frei im Raum bewegen. Befreit von der Schwerkraft können sie auf der ISS Gegenstände transportieren und sollen dem Bericht zufolge bald mit einem kleinen Arm nachgerüstet werden, etwa um sich festzuhalten.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes Video (TargetVideo GmbH) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (TargetVideo GmbH) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Mit den Robotern soll unter anderem die Mensch-Maschine-Interaktion an Bord einer Raumstation ausprobiert werden. Will ein Astrobee etwa in eine bestimmte Richtung schweben, sollen Pfeile das nach außen hin anzeigen, erklärt Trey Smith von der NASA gegenüber IEEE Spectrum. Ihm zufolge ist auch geplant, dass die Aktivitäten der Astrobee so geplant werden, dass sie möglichst zu jeder Zeit von der Erde aus überwacht werden und möglichst wenig Hilfe durch die Astronauten benötigen. Wenn die Verbindung einmal ausfällt, sollen die Roboter autonom weiterarbeiten.
Die beiden Roboter sollen am Mittwochnachmittag (Ortszeit) von Virginia aus mit der 11. Cygnus-Raumkapsel zur ISS geflogen werden. Für den Transporter von Northrop Grumman ist es der letzte Flug in der zwischenzeitlich verlängerten ersten Serie, die mit der NASA vertraglich vereinbart worden war. Die zweite Serie soll mit einem Versorgungsflug im Herbst beginnen. (mho)
