

Shadowcam des MIT soll autonome Autos um die Ecke schauen lassen
Bisherige Ansätze, "um die Ecke zu gucken", basieren auf Lasertechnik und Vernetzung. Am MIT setzen die Forscher anders an.
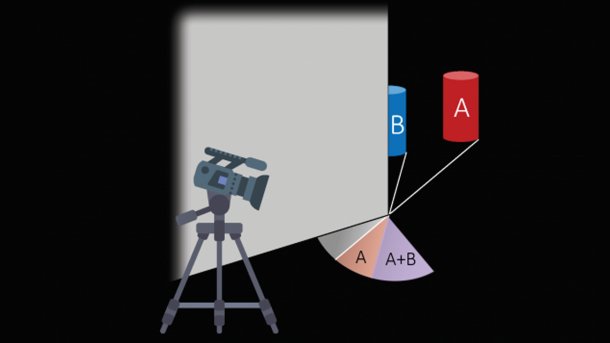
Darstellung des Funktionsprinzips aus dem Oktober 2017.
(Bild: Massachusetts Institute of Technology)
Die Idee: Anhand von Schattenwürfen erkennen autonom agierende Fahrzeuge, ob sich aus einer nicht einsehbaren Richtung ein anderes Gefährt oder ein Mensch nähert. Diese wird seit einiger Zeit am Massachussetts Institute of Technology (MIT) verfolgt, das nun erfolgreiche Experimente in einem Parkhaus mit der von ihr dafür entwickelten Technik präsentiert.
Die Technik, die finanziert wird vom Toyota Research Institute, soll in der Lage sein, besser als das menschliche Auge minimale Änderungen an Schattenbildern zu erkennen und daraus zu schließen, ob ein Objekt um die Ecke kommt. So sollen autonome Autos Zusammenstöße vermeiden können, die Technik sei aber auch denkbar zum Beispiel für Pflege- oder Versorgungsroboter in Krankenhäuser, die auf den Fluren Menschen ausweichen könnten.
Besser als LiDAR
Bei der von den MIT-Forschern "Shadowcam" genannten Technik werden laufend Bilder der Umgebung angefertigt und miteinander abgeglichen. Sie sei dem herkömmlichen LiDAR überlegen, das nur sichtbare Objekte erkennen könne. Die Shadowcam ermögliche es autonomen Fahrzeugen, mehr als eine halbe Sekunde schneller auf mögliche Kollisionen zu reagieren. Die Forscher räumen ein, dass das nicht nach viel klinge, aber jeder Bruchteil einer Sekunde zähle vor allem für autonome Fahrzeuge in hohem Tempo.
An der kalifornischen Stanford Universität wird ebenfalls an der Lösung des Problems gearbeitet, nicht sichtbare mögliche Gefahren zu erkennen. Dort wird an einem Laser-System gearbeitet, dessen Reflexionen ausgewertet wird. Der Kartenanbieter Here und der Autohersteller General Motors und der Zulieferer Mobileye setzen auf Echtzeitdaten vernetzter Autos.
Von innen nach außen
Die MIT-Technik hat sich in den Experimenten bisher nur in geschlossenen Räumen bewährt. Dort bewegten sich die Roboter langsamer fort und die Beleuchtung sei konsistenter als draußen, schreiben die Forscher. Für die Anwendung in autonomen Autos müsse die Technik noch verbessert werden. Die frühe Version habe noch sogenannte AprilTags verwendet, eine Art vereinfachter QR-Code, den die Roboter scannen und so ihre Position verorten.
Da es nicht praktikabel sei, die Umwelt mit Tags zu versehen, kombinierten die Forscher Bildererfassung und eine neue visuelle odometrische Lageschätzung, wie sie sich auch auf Rovern auf dem Mars befinden. Nun soll die Shadowcam weiter für unterschiedliche Lichtverhältnisse in Innenräumen und in der Umwelt weiterentwickelt werden. (anw)
