

Der lange Weg zum MaXYposi – ein Erfahrungsbericht (Teil 2)
Seite 2: Raus aus dem Mikrokosmos
Nach etwa sechs Stunden waren dann alle SMD-Bauteile verlötet. Dann müssen noch die ganzen Sockel und Anschlüsse (mit dickerem Zinn!) verlötet werden, nach stundenlanger Arbeit mit der Pinzette eine krasse Umstellung. Ein Problem hatte ich beim PL1 (ISP): Hierfür sollte ein Anschluss wie für PL301, PL300 etc. benutzt werden – dieser passte aber nicht auf meine Controller-Platine. Ich habe stattdessen eine doppelte Pin-Leiste genutzt. Das es hier nicht gepasst hat, könnte daran liegen, dass ich den Quarz (XTAL1) versehentlich in SMD bestellt habe. Hier kann man aber ohne Probleme einfach die Anschlusspins umbiegen und durch die Platine stecken. Zwar passt dadurch die vorgesehene Buchse dann nicht mehr, was mich aber nicht weiter stört. Auf dem GRBL-Controller in der Make wurde ebenfalls dieser Anschluss genutzt.
Vielleicht sollte man die Jumper mit in die Stückliste schreiben – die fehlten mir dann. Aber ansonsten verlief der Nachbau gemessen an den Erfahrungen im ersten Teil überraschend gut und ohne weitere Probleme.
Die erlösende LED
Dann muss man den In-System-Programmer (ISP) anschließen und die Arduino-Software starten. Unter Werkzeuge wählt man dann das richtige USB-Device und die korrekte CPU. Der COM-Port war bei mir schon richtig eingestellt. Das Bios-Hexfile musste ich noch verschieben, aber danach konnte ich den Bootloader brennen. Irgendwo im unteren Log-Bereich erschien klein und in roter Schrift die erlösende Meldung "Bootloader erfolgreich gebrannt". Dann kommt der FTDI per USB an den PC und nachdem alle Pins richtig mit dem GRBL-Controller verbunden sind, kann man die GRBL-Software hochladen. Bei meinem ersten Controller fehlten mir die Verbindungskabel – und es war Wochenende, mittlerweile tief in der Samstagnacht. Kurzerhand habe ich meinen Prototypen programmiert und getestet, indem ich die Anschlusspins der FTDI-Schnittstelle einfach mit der Hand an die Anschlusspins des GRBL-Boards gedrückt habe – no risk, no fun!
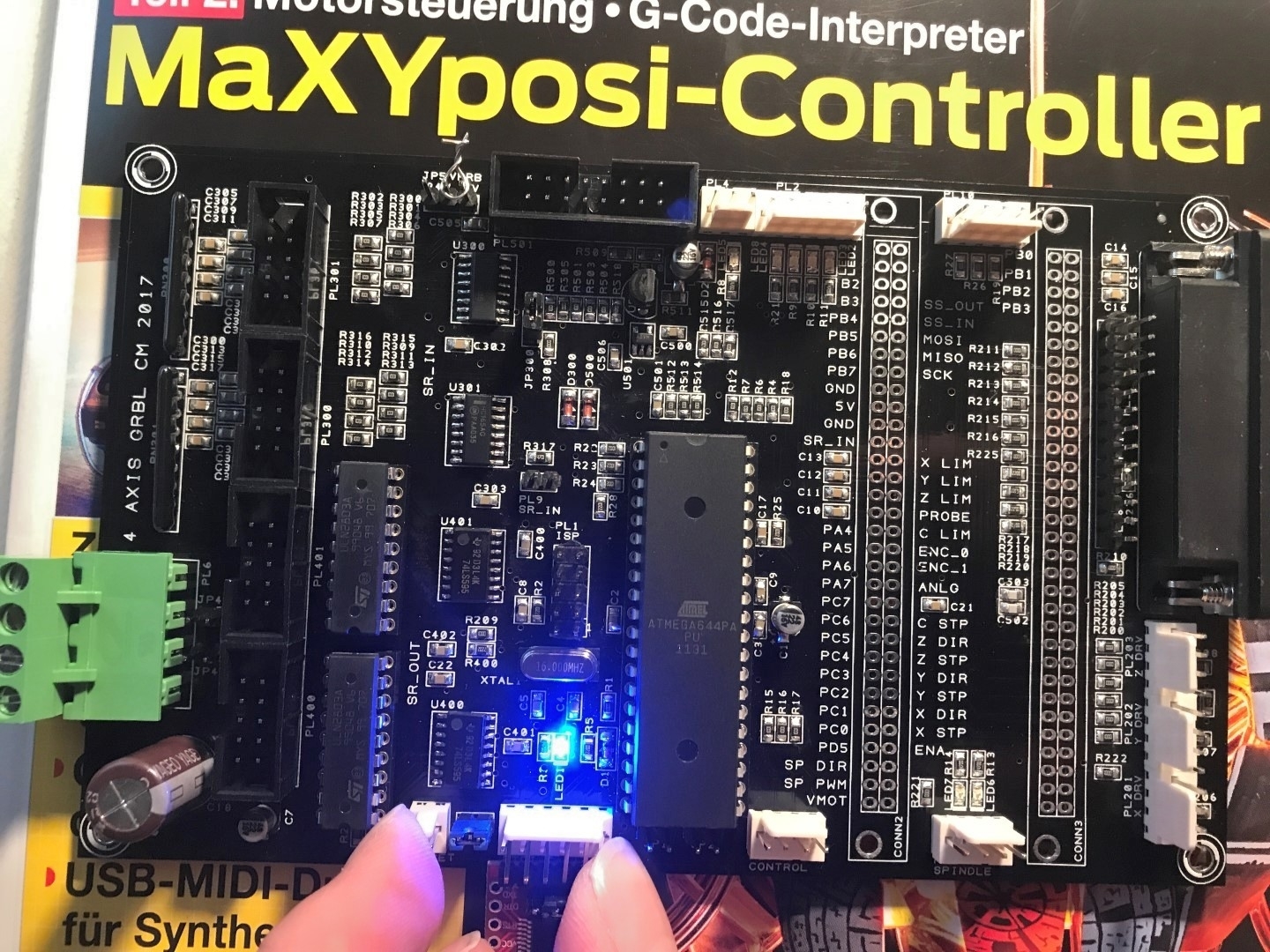
(Bild: Christopher Spitzner)
Nach dem Hochladen geht endlich auch die Betriebs-LED auf der GRBL-Platine von Carsten Meyer an! Ich habe nicht damit gerechnet, aber schon mein erster Controller lief direkt nach dem Zusammensetzen auf Anhieb – mit blauen anstatt roten LEDs und mit einer schwarzen Platine anstatt in Retro-Grün. Ich war zufrieden und erleichtert – es hat geklappt! Es war ein erhebendes Gefühl, nach so langer Vorarbeit ein solches Produkt mit den eigenen Händen nachzubauen. Ich bin dann zufrieden ins Bett gegangen – mittlerweile war es auch drei Uhr morgens ...
Kommunikationsaufbau
Sonntags machte ich dann die ersten Kommunikationsversuche mit dem Controller. Bei Tera Term hatte ich anfangs Probleme, deshalb habe ich zum ersten Mal über den Arduino Serial Monitor mit meinem Controller gesprochen. Mit der richtigen COM-Port-Einstellung funktionierte das direkt und ohne Probleme. Mittlerweile hatte sich auch Tera Term berappelt – warscheinlich muss man trotz Windows 10 den Computer neu starten, wenn man die Einstellungen für den COM-Port verändert. Der Arduino Serial Monitor hatte dieses Problem nicht.
Mittlerweile nutze ich auch den Serial Monitor aus dem GRBL Plotter. Der Vorteil hierbei: Man kann mit $$ die Konfiguration auslesen, wobei auch die Beschreibungen der jeweiligen Parameter mit angezeigt werden. Dank dieser Auflistung konnte ich einem User aus dem Forum helfen, seine Schrittmotor-Endstufe ans Laufen zu kriegen – der Enable-Pin war wohl vertauscht. In dieser Konfiguration kann man eine ganze Menge verändern. Mittlerweile gibt es aber seit Erscheinen von Make 3/17 einiges an Infos darüber.
