

Open-Source-Miniflitzer fürs Wohnzimmer
Mit den winzigen ferngesteuerten Autos verwandelt man das Wohnzimmer in eine Rennstrecke. Mit Sensoren können die Flitzer sogar auf Hindernisse reagieren.
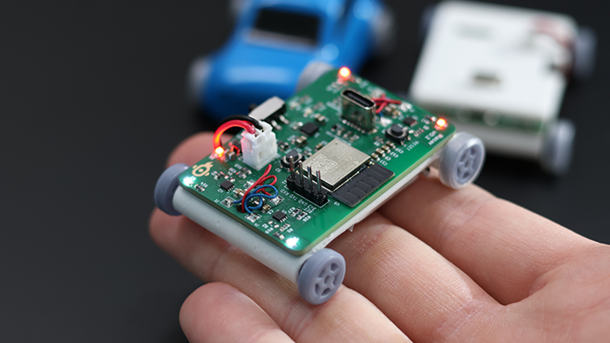
(Bild: Damian Glinojecki)
- Daniel Schwabe
Kleine ferngesteuerte Autos, die durch das Wohnzimmer sausen und auf spezielle Hindernisse auf der Strecke mit durchdrehenden Reifen, einem Geschwindigkeitsschub oder Kontrollverlust reagieren. Bei dieser Beschreibung denken viele bestimmt an Nintendos Mario-Kart-Live-Spiel. Dieses Spiel erlaubt einem, über eine Switch-Konsole physische Mario- und Luigi-Karts im eigenen Wohnzimmer herumfahren zu lassen. Maker Damian Glinojecki hat dazu eine Open-Source-DIY-Alternative entwickelt, die den Rennspaß ohne proprietäre Technik realisiert.
Unter der Haube der kinderhandkleinen Flitzer arbeitet ein ESP32, der vier winzige 3-V-DC-Motoren steuert. Mit Strom versorgt werden die Bauteile von einem Lithium-Ion-Akku, der direkt mit einem im Auto verbauten Ladeschaltkreis per USB-C geladen werden kann. Die Technik ist auf einem extra designten PCB aufgetragen.
3D-gedruckten Karosserie
Damit die Autos nicht nur ferngesteuerte Standard-Spielzeuge sind, befindet sich an der Unterseite der 3D-gedruckten Karosserie ein Sensormodul mit einem Magnetschalter und einem Farbsensor. Steuert man seinen Racer bei einem hitzigen Rennen über ein auf dem Boden liegendes magnetisiertes Hindernis oder Power-Up, meldet das der Magnetschalter. Dadurch wird mit dem Farbsensor die Farbe des überfahrenen Streckenabschnitts eingelesen und je nach Farbe reagiert das Auto darauf.
Bei einem grünen Hindernis verliert man kurz die Kontrolle, bei einem weißen wird man schneller oder bei einem schwarzen langsamer. Diese "Aktionsfelder" bestehen aus einer dünnen Magnetplatte, die bunt beklebt ist.
Videos by heise
Mit diesen Bauteilen lassen sich dann Strecken planen, die nicht nur jedes Mal neu und abwechslungsreich sind, sondern sich auch schnell auf- und abbauen lassen.

(Bild: Damian Glinojecki [Link auf https://www.youtube.com/watch?v=6jzG-BMannc])
Für die Steuerung der Autos kommt die BLE-Kompatibilität des ESP32 zum Einsatz. Ein extra Controller, der ebenfalls auf einem ESP32 basiert, verbindet sich kabellos mit den Autos. Auf dem Controller sind ein Analogstick und vier Buttons für die Steuerung aufgetragen.

(Bild: Damian Glinojecki [Link auf https://www.youtube.com/watch?v=6jzG-BMannc])
Glinojecki hat auf seinem YouTube-Kanal ein Video über das Projekt veröffentlicht, in dem man die Autos in Aktion sehen kann. Dort erklärt er auch seine Gedankengänge bei der Wahl der Technik.
Empfohlener redaktioneller Inhalt
Mit Ihrer Zustimmung wird hier ein externes YouTube-Video (Google Ireland Limited) geladen.
Ich bin damit einverstanden, dass mir externe Inhalte angezeigt werden. Damit können personenbezogene Daten an Drittplattformen (Google Ireland Limited) übermittelt werden. Mehr dazu in unserer Datenschutzerklärung.
Alle Daten für dieses Projekt, Gerber-Dateien, KiCad-Files, Stücklisten und den Source Code findet man auf der GitHub-Projektseite.
Wer schon ein Fahrzeug hat, aber noch eine Fernsteuerung braucht, der findet in unserem Artikel zu einer DIY-Fernsteuerung für Fahrzeuge und Robotern bestimmt Anregungen.


(das)
