

Transistor-Bot auf Breadboard
Seite 5: Linienfolger oder Aufräumer
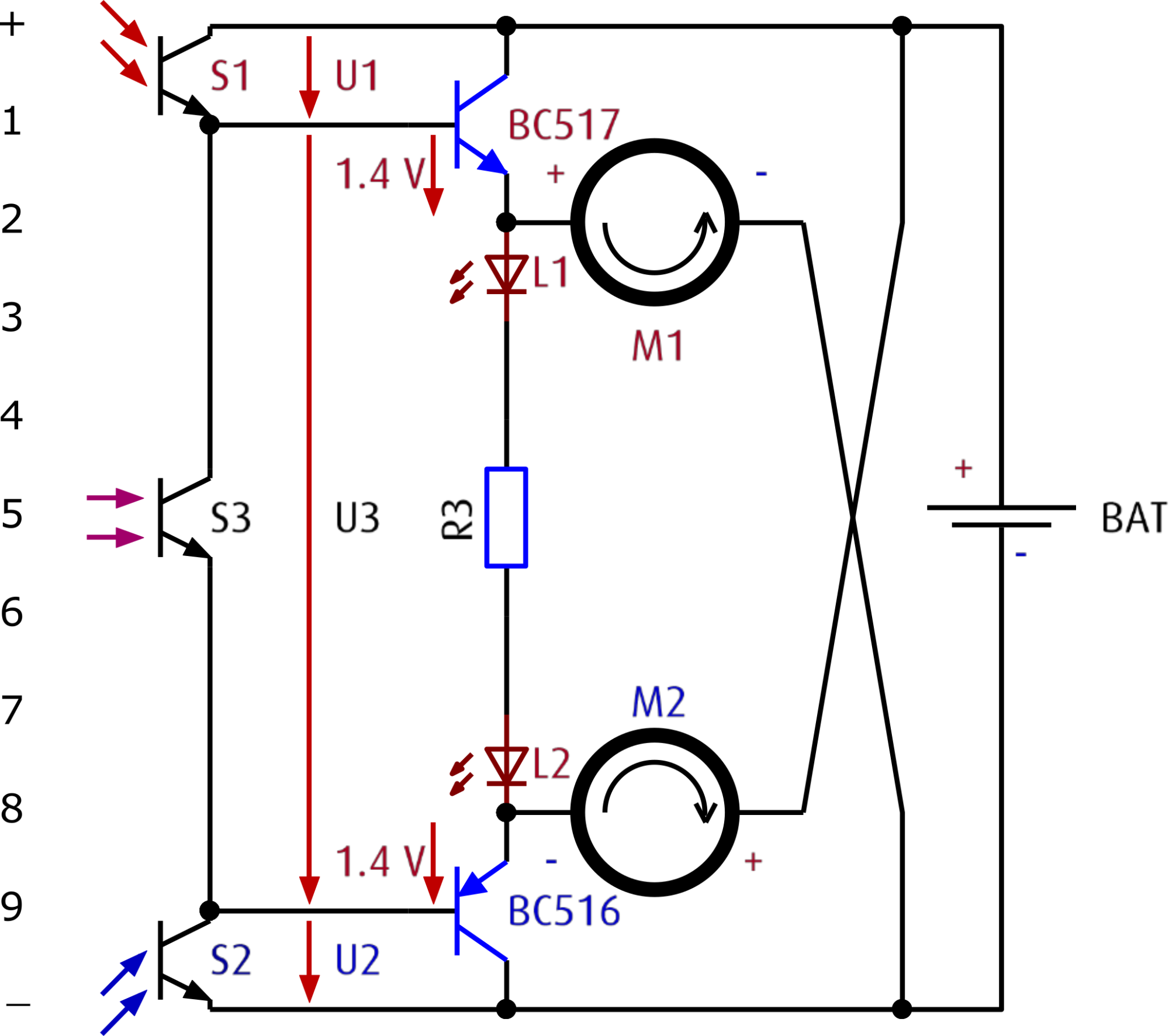
Linienfolger oder Aufräumer
Bei der ersten Schaltung wurden die Motoren so angesteuert, dass unser Bot Hellem gefolgt ist. Für den Linienfolger kehren wir das Verhalten nun um, indem wir die Anschlüsse des linken mit denen des rechten Motors tauschen, sodass der rechte Transistor den rechten Motor und der linke Transistor den linken Motor ansteuert.
Erkennt die Breite einer Linie
Am einfachsten ist es, eine Linie mit einem schwarzen Isolierband aufzukleben. Ein solches ist flexibel genug, um auch Kurven legen zu können. Wichtig dabei ist ein heller Untergrund. Damit die Sensoren nicht von der Beleuchtung beeinflusst werden, sollte sich diese möglichst direkt über unserer Versuchsanordnung befinden.

Für den Linienfolger richten wir nun alle drei Sensoren parallel nach vorne und schräg zum Boden hin aus. Je weiter die Sensoren zum Boden hin geneigt sind, desto schärfer reagiert er auf die Linie aber desto weniger vorausschauend navigiert er. Mit dem Abstand zwischen den äußeren Sensoren S1 und S2 können wir die Genauigkeit justieren, mit der er auf der Linie fährt. Sind sie zu knapp an der Linie, so ist der Linienfolger permanent am Ausregeln und tendiert dazu, beim Fahren hin und her zu schwingen. Es ist also empfehlenswert, die äußeren Sensoren etwas neben die Linie zu richten, sodass es einen gewissen Bereich um die Mitte der Linie gibt, in dem beide Motoren mit derselben Geschwindigkeit drehen.
Der Sensor S3 ist bei geraden Strecken direkt auf die Linie gerichtet. Bei ausreichender Linienbreite und ausreichendem Abstand zwischen linkem und rechtem Sensor ist der Kontrast stark genug, damit U3 ansteigt und der Linienfolger seine Geschwindigkeit erhöht. Bei starken Kurven, Abzweigungen oder gekreuzten Linien wird er hingegen sein Tempo vorübergehend drosseln. Das wird er auch dann machen, wenn er gar keine Linie unter sich hat und erst eine aufspüren muss. Wir können diesbezüglich mit unterschiedlichen Neigungswinkeln der drei Sensoren experimentieren, um damit den Schwellwert zu variieren, bei dem der Linienfolger seine Geschwindigkeit ändert. Und schließlich haben wir auch hier wieder die Option, den mittleren Sensor nach hinten zu richten, sodass mehrere Bots auf einer Linie fahren können und dabei über den hinteren Sensor S3 den Abstand zueinander regeln.
Unterscheidet die Größe von Bausteinen
Ebenso wie eine schwarze Linie stellt auch ein Gegenstand auf hellem Untergrund einen Kontrast dar, weil senkrecht einfallendes Licht am waagerechten Boden besser reflektiert wird, als an den vertikalen Seiten eines Objektes. Je nachdem welcher der drei Sensoren von einem Objekt abgeschattet wird, ändert unser MiniBot seine Richtung oder Geschwindigkeit.
Wir können nun ausgehend von der zuvor beschriebenen Schaltung testen, wie unser Schieberoboter auf unterschiedliche Gegenstände, wie beispielsweise verschieden große Bausteine reagiert. Dabei müssen wir unter Umständen lediglich die Orientierung der einzelnen Sensoren anpassen. Die seitliche Ausrichtung der Sensoren S1 und S2 und der Neigungswinkel von S3 kann dabei so an die Größe der Gegenstände angepasst werden, dass unser Aufräum-Bot die gewünschten Objekte präzise geradeaus schiebt und seine Geschwindigkeit in Abhängigkeit von ihrer Größe variiert. Je nachdem, ob er nämlich einen kleinen Baustein (S3 dunkler als S1 und S2) oder einen größeren Baustein (S1, S2 und S3 dunkel) vor sich hat, erledigt er seine Aufräumarbeit mit unterschiedlicher Geschwindigkeit. Und ist er beispielsweise dabei, einen kleinen Baustein in eine herumliegende Ansammlung von Bausteinen zu schieben, so werden die äußeren Sensoren ebenso abgedunkelt, weshalb er langsamer wird und sich eventuell für einen neuen Baustein entscheidet, den er weiterschieben möchte.
