

Transistor-Bot auf Breadboard
Seite 7: Verfolger
Verfolger
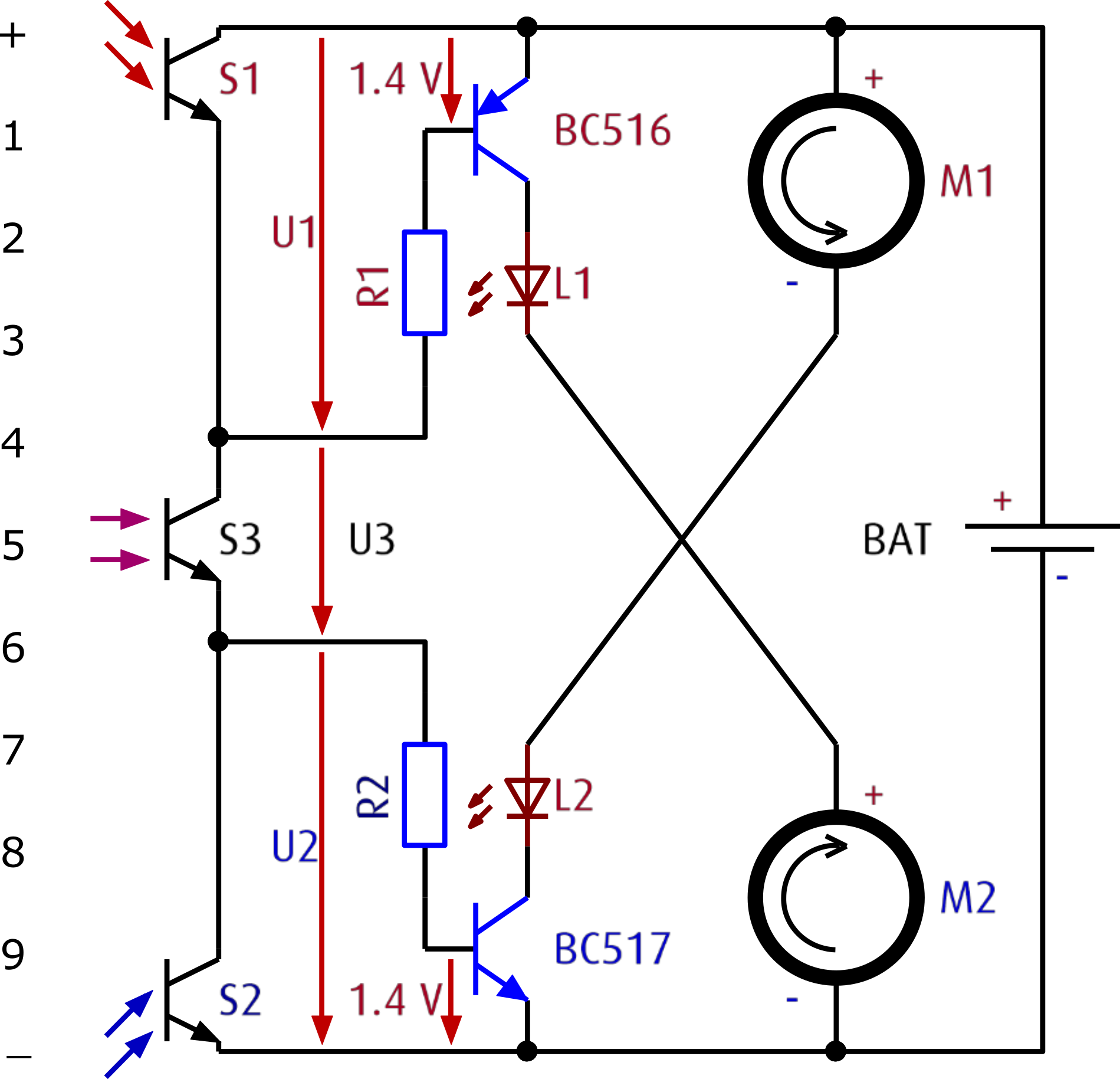
Bei der Emitterschaltung platzieren wir nun den PNP-Transistor BC516 in die Reihen +/1/2 und den NPN-Transistor BC517 in die Reihen 8/9/- . Die Motoren schließen wir so an, dass sie jeweils in Serie mit einer der LEDs liegen. Im Unterschied zur ersten Kollektorschaltung verbinden wir demnach den vorderen Anschluss des rechten Motors M1 mit Reihe 7 und den hinteren Anschluss des linken Motors M2 mit Reihe 3. Die beiden LEDs bleiben in den Reihen 2/3 und 7/8.
Folgt Objekten in bestimmtem Abstand
Bei der Kollektorschaltung hat ein Abdunkeln des mittleren Sensors S3 bewirkt, dass U3 größer wird und unser MiniBot beschleunigt. Bei der Emitterschaltung hingegen, werden die Motoren in diesem Fall langsamer und bleiben bei einer großen Spannung U3 sogar stehen. Dann ist nämlich U1 < 1,4 V als auch U2 < 1,4 V und somit an beiden Transistoren UBE < 1,4 V. Das eröffnet nun ganz neue Verhaltenmuster für den kleinen Roboter.
Damit der Verfolger-Bot bei einigermaßen gleichmäßiger Beleuchtung aller drei Sensoren nicht ungewollt zum Stillstand kommt, legen wir die Sensoren zunächst noch direkt (ohne Vorwiderstand R1 bzw. R2) an die Basisanschlüsse der Transistoren. Die seitlichen Sensoren S1 und S2 richten wir etwa 45° zur Seite und den mittleren Sensor S3 waagerecht nach vorne.
Wir können nun testen, ob der MiniBot einem dunklen Objekt oder einer Hand folgen und in gewissem Abstand davor stehen bleiben kann. Mit dem Neigungswinkel des Sensors S3 können wir dabei den Abstand zum verfolgten Objekt einstellen. Je weiter S3 zum Boden geneigt wird, desto später wird er ein Objekt vor sich detektieren und davor stehen bleiben.
Folgt einem Schatten über sich
Für die folgenden Funktionen ist es vorteilhaft, wenn die Motoren mit unterschiedlicher Geschwindigkeit laufen können und diese nicht zu sprunghaft wechseln. Dazu integrieren wir nun einen hochohmigen Basis-Vorwiderstand R1 zwischen die Reihen 1 und 4 und R2 zwischen die Reihen 6 und 9. Die Berechnung der entsprechenden Widerstandswerte haben wir bereits im letzten Artikel erläutert. Die entsprechenden Anschlüsse der Sensoren wechseln wir nun von Reihe 1 auf 4 und von Reihe 9 auf 6.
Bei dieser Variante richten wir alle drei Sensoren nach oben. S1 und S2 sind dabei etwas schräg zur Seite und nach vorne orientiert. Dabei müssen wir darauf achten, dass es zwischen den Anschlüssen der LEDs und der Sensoren zu keinem Kurzschluss kommt.
Um den Schattenfolger gut navigieren zu können, benötigen wir nun wieder einen Platz unter einer Lampe. Wird S1 oder S2 abgeschattet, so dreht er sich in die entsprechende Richtung zum Schatten hin. Werden S1 und S2 zugleich abgeschattet, so wird er dem Schatten über sich so lange folgen, bis S3 mehr abgedunkelt ist als S1 und S2. Sind die Sensoren passend eingestellt, so sollte der Bot also einer Hand über sich folgen und genau unter ihr stehen bleiben können.
Die LEDs können nun bereits angehen noch bevor der Strom hoch genug ist, damit der entsprechende Motor beginnt, sich in Bewegung zu setzen. Wir können also bereits am Aufleuchten der LED-Augen erkennen, wenn der Schattenfolger kurz davor ist loszufahren.
