

Robotikwettbewerb MBZIRC: Drohnen auf der Flucht und Bonner Roboter auf Erfolgskurs
Mancher Roboter scheint angesichts der Schwere der Aufgaben des Robotikwettbewerbs in Abu Dhabi lieber die Flucht zu ergreifen. Andere dagegen glänzen mit perfekter Performance etwa beim Arbeiten mit selbst auszusuchenden Werkzeugen.
Runter kommen sie immer, die Frage ist nur wie, wo und wann. Im Fall der Drohne des japanischen Teams Project C.G.S., die beim Roboterwettbewerb MBZIRC (Mohamed Bin Zayed International Robotics Challenge) in Abu Dhabi in der Kategorie 1 (Landung auf einem fahrenden Fahrzeug) startete, konnte die Frage bisher nicht beantwortet werden.
Project C.G.S. ist ein besonderes Team, das einzige im Wettbewerb, das keiner Universität oder Firma zugeordnet ist, sondern aus einigen Personen besteht, die sich für Robotik interessieren. Sie hätten sich beim Studium in Japan kennengelernt, lebten mittlerweile über das ganze Land verstreut und hätten sich an den Wochenenden getroffen, um ihren Flugroboter zu entwickeln, sagt Teammitglied James Reynolds. Die Entwicklung des Roboters hat das Team in einem ersten und zweiten Video dokumentiert und damit die MBZIRC-Jury überzeugt, Project C.G.S. für die Endausscheidung in Abu Dhabi zuzulassen.
Bemerkenswerte Leistung
Die dreitägigen Wettkämpfe, die mit einer Grand Challenge enden sollen, sind eigentlich die Finalrunde des Wettbewerbs. Die 25 teilnehmenden Teams sind aufgrund von Dokumentationen ihrer Robotiksysteme in Text- und Videoform ausgewählt worden. Es bis hierher ohne die Rückendeckung durch eine Institution geschafft zu haben, ist für ein unabhängiges Team eine bemerkenswerte Leistung. Auch Fördergelder hätten sie nicht erhalten, sagt Reynolds. Von den fünf Millionen US-Dollar Preisgeld waren drei Millionen für die Unterstützung von Teams vorgesehen. Eine Million erhält der Sieger der Grand Challenge, jeweils 350.000 die Sieger in den drei Wettbewerbskategorien.
Werkelnde Roboter und Drohnen, vom Winde verweht (7 Bilder)

(Bild: heise online / Hans-Arthur Marsiske)
Team Project C.G.S. ist jetzt allerdings nicht mehr dabei, weil ihre Drohne abgehauen ist. Die Wettbewerbsfelder für die Flugroboter sind an den Seiten mit 20 Meter hohen Netzen gesichert, aber nach oben gibt es keinen Schutz – und diese Lücke nutzte der Roboter. Auf einmal reckten auch auf den benachbarten Feldern die Zuschauer die Köpfe nach oben, wo die außer Kontrolle geratene Drohne höher und höher stieg – ausgerechnet während ein vom nahe gelegenen Flughafen gestartetes Flugzeug das Gelände überquerte – und dann davondriftete. Bevor der Kontakt verloren ging, entschloss sich der Operator, die Drohne abzuschalten. Es wird vermutet, dass sie in einen nahe gelegenen Fluss gestürzt ist. Mangels einer Reservedrohne bedeutet es für das Team das Aus bei diesem Wettbewerb.
Abstürze
Das Team der Technical University of Denmark hatte gleich im Anschluss das gleiche Problem. Die vorangegangene Erfahrung mag dem Operator aber die Entscheidung erleichtert haben, die Drohne frühzeitig abzuschalten, nachdem sie die Sicherheitsnetze gerade erst um wenige Meter überstiegen hatte. So stürzte sie auf dem Wettbewerbsfeld ab, ohne jemanden zu gefährden. Die Dänen können trotzdem weitermachen, da sie weitere Drohnen dabei haben.
Es gab noch weitere Suspense-Momente, etwa als die Drohne des Teams VirginiaTech beim ersten Landeversuch auf dem Fahrzeug abrutschte und abzustürzen drohte, sich aber noch einmal fing und im zweiten Anflug dann sicher auf dem Dach aufsetzte.
Bemerkenswert auch der Versuch des Teams von der University of Catania, mit einer optimierten Strategie erneut die Führung zu übernehmen, nachdem es gestern vom Bonner Team NimbRo und dem Beijing Institute of Technology auf den dritten Platz zurück gedrängt worden war: Die Drohne bewegte sich nach dem Start sofort zum Zentrum des Feldes, wo der 8-förmige Kurs des Fahrzeugs sich kreuzt, und wartete dort in sehr niedriger Höhe, knapp über dem Dach des Fahrzeugs. So konnte bereits nach 33 Sekunden die Landung eingeleitet werden. Der Roboter berührte das Dach, konnte sich jedoch nicht halten und stürzte ab. Ein erneuter Versuch war danach aufgrund der Schäden nicht mehr möglich. Bei einer gelungenen Landung hätte Catania damit die Führung in dieser Wettbewerbskategorie übernommen.
Neuer Anlauf
Danach trat das Team mit dem unaussprechlichen Namen "CTU Prague-Upenn-UoL" (Czech Technical University/University of Pennsylvania/University of Lincoln) an und verfolgte eine ähnliche Strategie: Die Drohne wartete in der Mitte des Feldes, jedoch in größerer Höhe und ließ sich dann auch beim Verfolgen des Fahrzeugs mehr Zeit und zeigte auffallende Sorgfalt bei den Landungsversuchen: Zweimal brach der Roboter die Landung ab, als sie zu scheitern drohte, und begann sie erneut aus größerer Höhe.
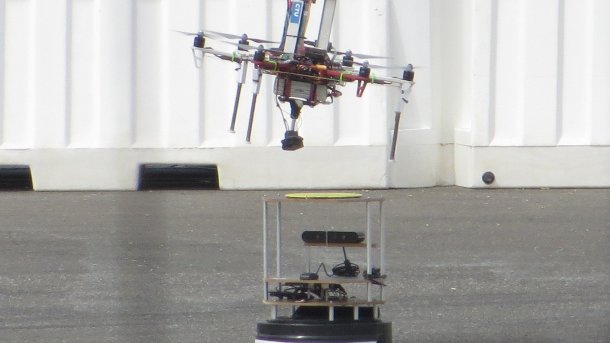
Roboter in der Luft (7 Bilder)

(Bild: heise online / Hans-Arthur Marsiske)
Beim dritten Versuch setzte er sicher auf, nach 1:28 Minuten – eine hervorragende Zeit, aber nicht ausreichend für Platz 1. Den hält weiterhin das Team vom Beijing Institute of Technology, dem die Landung auch im zweiten Durchgang mit der Bestzeit von 1:09 Minuten gelang. "Unter optimalen Bedingungen wäre es auch in etwa 30 Sekunden möglich", sagte Teamchef Defu Lin. "Wir nutzen für die Orientierung des Roboters ausschließlich visuelle Informationen."
Vom Flugverhalten her scheint der Roboter des Teams NimbRo, von dessen Bilderbuchlandung es ein Video gibt, dem chinesischen Spitzenreiter durchaus ebenbürtig zu sein. Weil die Landung aber erst nach einem Reset gelang, fiel die Zeitwertung schlechter aus.
Auf Schatzsuche
Offzielle Platzierungen gibt es bislang nicht, aber beim anderen, als "Schatzsuche" bezeichneten Wettbewerb für fliegende Roboter (Kategorie 3), dürfte das Team CTU Prague-Upenn-UoL die Nase vorn haben. Als eines von wenigen Teams überhaupt startete es mit seinen drei Drohnen im autonomen Modus, was doppelt so viele Punkte bringt wie Fernsteuerung. Trotz starken Windes gelang es, mehrere statische Objekte zu greifen und zielsicher in einer Kiste zu deponieren. Mehrmals näherten sich die Roboter auch beweglichen Objekten, bekamen sie jedoch nicht zu fassen. Die etwa 20 Zentimeter durchmessenden Scheiben sind selbst bei Fernsteuerung nur sehr schwer zu greifen, da sie sehr präzise angesteuert werden müssen.
Für Tomas Krajnik (Lincoln University) liegt die Herausforderung bei dieser Kategorie zum einen in der Wahrnehmung, da die farbig markierten Objekte bei Tageslicht nicht ohne weiteres zu erkennen sind. Zum anderen stellen Planung und Koordination der Aktionen zwischen den drei Robotern Anforderungen an die künstliche Intelligenz der Roboter, die alle Daten an Bord verarbeiten müssen. Wettbewerbskategorie 1 sieht er dagegen eher als Kontrollproblem. "Die Landefläche auf dem Fahrzeug ist deutlich schwarzweiß markiert und die Fahrstrecke ist bekannt", sagt er. "Da lässt sich vieles vorprogrammieren."
Das Team profitiert offensichtlich auch ganz erheblich von den Forschungen, die in den letzten Jahren am Vijay Kumar Lab der University of Pennsylvania durchgeführt wurden. Giuseppe Loianno, Mitglied des Forschungsteams, zeigte uns auf seinem Smartphone mit sichtlichem Stolz das jüngste Video, dessen Titel Aggressive Flight keinesfalls übertrieben klingt: Da sind Quadrokopter zu sehen, die mit atemberaubender Geschwindigkeit und um 45 oder sogar 90 Grad gekippt durch schmale Spalten fliegen. "Die dabei wegfallenden Auftriebskräfte und zugleich seitlich wirkenden Rotorkräfte werden im voraus in der Flugplanung berücksichtigt, alles mit dem Bordcomputer und der Sensorik an Bord", sagt Loianno. Kein Wunder, dass die Drohnen dieses Teams sich so elegant in der MBZIRC-Arena bewegen.
Jäger und Sammler
Auch dieses Team wurde von der Konkurrenz aus Bonn bedrängt: Team NimbRo, das seinen ersten Versuch wegen zu starken Windes abbrechen musste, konnte bei einer Wiederholung ein mobiles Objekt einsammeln, was mehr Punkte bringt als die statischen Objekte. Es scheint dennoch nur für den zweiten Platz gereicht zu haben, zumal der zweite Versuch ergebnislos blieb.
In der Kategorie 2 (Finden eines Armaturenbretts und Betätigen eines Ventils) dürfte NimbRo der Sieg dagegen kaum noch zu nehmen sein. Das Team der Technical University of Denmark hatte seine Zeit im zweiten Lauf zwar noch einmal verbessert und lag damit vorübergehend vorn. Doch der Bonner Roboter bot im zweiten Durchgang eine traumhafte Performance, griff zielsicher nach dem richtigen Werkzeug, drehte die Ventilschraube und war in Rekordzeit fertig. Die genaue Zeit wurde nicht angezeigt, wir haben vom Team aber später erfahren: Es waren 1:24 Minuten! Zur Erinnerung: Andere Teams haben allein fürs Scannen der Werkzeuge bis zu zehn Minuten benötigt. Die Leistung wurde auch von den Dänen mit starkem Applaus belohnt. Beiden Teams ist zu danken, dass sie echten Sportsgeist in diesen Wettbewerb gebracht haben.
Zum Schluss wird es noch einmal auf eine andere Weise spannend: Dann steht die Grand Challenge auf dem Programm, bei der die Teams alle drei Wettbewerbskategorien innerhalb von 25 Minuten auf einem Feld bewältigen sollen. Bloß scheint von den Teilnehmern bislang niemand zu wissen,wie das eigentlich funktionieren soll. Alles gleichzeitig oder nacheinander? Betrifft ein Reset dann nur die jeweilige Kategorie oder alle? Wäre eigentlich kein Wunder, wenn noch mehr Roboter die Flucht ergriffen. (jk)
