

Tödlicher Crash mit autonomem Auto: Fußgänger auf Fahrbahn nicht vorgesehen
In einem Unfall mit einem Roboterauto von Uber kam 2018 eine Frau ums Leben. Das Auto konnte verkehrswidrig die Straße überquerende Personen nicht erkennen.
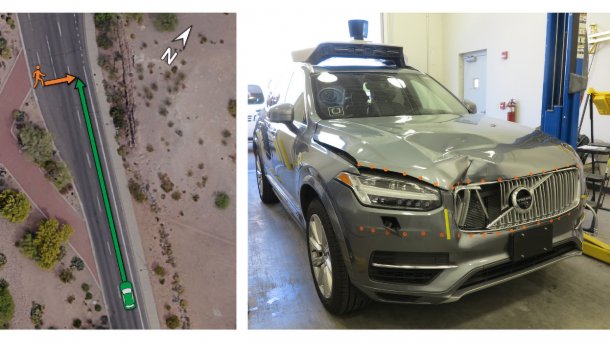
Das Unfallfahrzeug
(Bild: NTSB)
Der autonom fahrende SUV von Uber, der vor anderthalb Jahren eine Frau in Arizona erfasste und tödlich verletzte, konnte keine Fußgänger erkennen, die regelwidrig die Straße überqueren ("jaywalking"). Das geht aus einem nun veröffentlichten Report der US-Behörde für Transportsicherheit (NTSB) hervor, der eine Reihe von Ergebnissen der Untersuchungen zusammenfasst.
Unter anderem wird darin detailliert aufgelistet, wie die Software des Fahrzeugs die Frau mit ihrem Fahrrad in den Sekunden vor dem Crash immer wieder umklassifizierte und viel zu spät erkannte, dass es zu dem Zusammenstoß kommen würde. Selbst dann löste die Technik in dem Testfahrzeug aber keine hinreichende Reaktion aus.
Erster tödlicher Unfall mit autonomem Auto
Mitte März 2018 hatte ein autonom fahrendes Testfahrzeug des Fahrdienstvermittlers Uber in Tempe im US-Bundesstaat Arizona eine Fußgängerin erfasst und tödlich verletzt. Sie hatte ein Fahrrad, an dem mehrere Plastiktüten hingen, neben sich hergeschoben und so eine mehrspurige Straße überquert. Zwar war sie damit für das Auto schlecht zu erkennen, aber die bisher bekannten Informationen über den Hergang hatten trotzdem die Fragen aufgeworfen, wieso die Frau von dem Auto zwar erfasst worden war, aber der Wagen trotzdem nicht abbremste oder auswich. Die detaillierte Auflistung der NTSB gibt nun Antworten.
Dem Bericht zufolge fuhr der autonom fahrende, umgebaute Volvo-SUV von Uber 70 km/h, als die Frau 5,6 Sekunden vor dem Crash erstmals erfasst wurde. Sie wurde aber nicht als die Straße überquerende Frau erkannt, sondern nur als "Vehikel" klassifiziert, dem keine Bewegungsrichtung zugeschrieben wurde. Innerhalb der nächsten Sekunden wurde diese Klassifikation andauernd geändert; hier wurde ein weiterer Aspekt der Software zum Problem: Mit jeder neuen Klassifikation wurden die zuvor registrierten Ortsangaben zurückgesetzt. Das Roboterauto meinte deswegen, andauernd ein neues stationäres "Vehikel", "unbekanntes Objekt" oder "Fahrrad" zu erkennen. Die Bewegung in Richtung der Autospur wurde sekundenlang nicht vorhergesehen.
Erst 1,5 Sekunden vor dem Crash – und immer noch bei 70 km/h – wurde ein "unbekanntes Objekt" erfasst, das sich "teilweise in die Spur des SUV" bewegte. Die Algorithmen berechneten deswegen ein Ausweichmanöver, heißt es bei der NTSB. Genau 1,2 Sekunden vor dem Crash erkannte das System dann ein Fahrrad, das sich "voll auf dem Weg in die Spur" befände, das Ausweichmanöver war nicht mehr möglich. Hier zeigt sich nun ein weiteres Problem der damaligen Software. Wenn das System solch ein gefährliche Situation erkannte, pausierte es für eine Sekunde, um dem im Auto sitzenden Sicherheitsfahrer Zeit für ein Eingreifen zu geben. Ein Alarm war aber nicht vorgesehen. So sollten ungewollte Konsequenzen eines Fehlalarms vermieden werden. Der in dem Volvo eingebaute Notbrems-Assistent war abgeschaltet.
Ungebremster Aufprall
0,2 Sekunden vor der Kollision endete die einsekündige Pause, in der die anwesende Sicherheitsfahrerin nichts unternommen hatte, sie hatte die Straße nicht im Blick. Die Software war nun so programmiert, dass sie nur voll in die Bremsen steigt, wenn die Kollision auf diesem Weg verhindert werden konnte. Andernfalls war eine akustische Warnung vorgesehen und nur eine graduelle Bremsung. Im konkreten Fall übernahm die Sicherheitsfahrerin in diesem Moment das Steuer und deaktivierte damit die autonome Steuerung. Es kam zum tödlichen Crash und erst 0,7 Sekunden danach, bei einer Geschwindigkeit von immer noch 60 km/h, begann die Sicherheitsfahrerin das Auto abzubremsen.

(Bild: NTSB)
Fatal war in diesem Fall also nicht nur, dass das autonome Auto nicht darauf vorbereitet war, dass Menschen unachtsam oder regelwidrig Straßen überqueren ("jaywalking"), sondern noch weitere Entscheidungen der Software-Entwickler. Wie die NTSB schreibt, hat Uber bei seinen Testfahrzeugen nun unter anderem die einsekündige "Action suppression" deaktiviert. Wird eine gefährliche Situation erkannt, bremsen diese nun auch dann mit maximaler Kraft, wenn das einen Crash nicht verhindern wird. Außerdem werden nun bei der Prognose der Bewegung eines erkannten Objekts auch dann vorherige Standortmessungen einbezogen, wenn das Objekt neu klassifiziert wird. Simulationen hätten ergeben, dass die neue Software die Frau 4,5 Sekunden vor der Kollision korrekt erkannt und kurze Zeit später eine kontrollierte Bremsung eingeleitet hätte.
Die NTSB-Ermittler wollen am 19. November in einer öffentlichen Sitzung über ihre Ergebnisse informieren. Uber hatte seine Testfahrten Ende 2018 wieder aufgenommen, aber nur auf einer kleinen Straßenschleife in der Nähe der Zentrale der Uber-Abteilung für autonomes Fahren in Pittsburgh. Dort gibt es eine Geschwindigkeitsbegrenzung von 25 Meilen pro Stunde (40 km/h). Das sei auch die höchste Geschwindigkeit, mit der die Testfahrzeuge auf öffentlichen Straßen unterwegs sind. Aus dem Bericht der NTSB geht nun auch noch hervor, dass es zwischen September 2016 und März 2018 (ohne den tödlichen Crash) insgesamt 37 Unfälle und "Vorfälle" unter Beteiligung eines autonomen fahrenden Roboterautos von Uber gab. (mho)
