

Mobile Edge Computing: Straßenlaternen führen autonome Autos
Kreuzungen sind für autonome Autos besonders herausfordernd. In Ulm wurde erprobt, wie Sensoren in der Infrastruktur und schnell übermittelte Daten helfen.
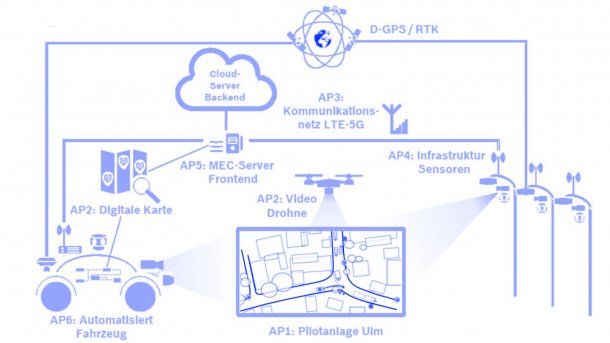
Das Ulmer MEC-System im Überblick.
(Bild: Bosch, Universität Ulm, Osram)
Kreuzungen sind für autonome Autos eine besondere Herausforderung. Dort können Fahrzeuge Fußgänger verdecken, Radfahrer kreuzen und Linienbusse plötzlich anfahren. Damit dieses Kuddelmuddel für automatisierte Fahrzeuge durchschaubar wird, haben sich vor drei Jahren Forscher von Bosch und unter anderem von der Universität Ulm an das Projekt MEC-View gemacht. Nun haben sie ihre Ergebnisse vorgestellt .
In dem Projekt ging es darum, mit Mobile Edge Computing Video- und Sensordaten aus Verkehrsinfrastruktur wie Straßenleuchten für automatisierte Fahrzeuge in Echtzeit nutzbar zu machen. Die in die Fahrzeuge eingebauten Sensoren reichen für komplexe Verkehrssituationen nämlich nicht immer aus. Im Ulmer Stadtteil Lehr wurde dafür eine Pilotanlage aufgebaut, in der Leuchten mit Video- und Lidar-Sensoren ausgerüstet wurden. Befahren wurde diese mit einem automatisierten Testfahrzeug des Ulmer Instituts für Mess-, Regel- und Mikrotechnik.
In dem Projekt wurde für die Datenübertragung LTE mit einer "optimierten Konfiguration" eingesetzt, um die Latenzen gering zu halten, geht es der Beschreibung des Projekts MEC-View hervor. Künftig ist für solche Zwecke 5G-Mobilfunk vorgesehen, in der Echtzeit-Datenübertragung eine Basisfunktion sei.
MEC-Server
Die Verarbeitung der Echtzeitdaten möglichst nah an der Quelle übernehmen Mobile Edge Computing Server (MEC-Server), die in das Mobilfunknetz integriert sind. Sie kombinieren die Sensordaten der Straßenleuchten mit denen der Umfeldsensorik des Fahrzeugs sowie mit HD-Karten. Daraus erzeugen sie ein lokales Umfeldmodell der aktuellen Verkehrssituation und funken es an die Fahrzeuge.
Videos by heise
Eine besondere Aufgabe für das Versuchsfahrzeug war das Einfädeln. Dazu haben die Ulmer Ingenieure und Informatiker einen Planungsalgorithmus entwickelt und angewandt. Dieser Algorithmus nutzt die eigenen Sensorinformationen und das übermittelte Umfeldmodell, damit sich das Testfahrzeug vor oder nach einem weiteren Auto oder in eine Lücke auf der Hauptstraße einfädeln kann – sofern die Situation dies zulässt.
Verkehrsleitzentrale mit Überblick
Denkbar sei, dass künftig beispielsweise die Verkehrsleitzentralen der Städte mit solchen Servern ausgestattet sind, um die Daten herstellerübergreifend mit allen Verkehrsteilnehmern zu teilen. Neben Bosch waren an dem mit 5,5 Millionen Euro vom Bundeswirtschaftsministerium geförderten Projekt Mercedes-Benz, Nokia, Osram, TomTom, die Firma IT Designers beteiligt und neben der Uni Ulm jene in Duisburg-Essen. Die Erkenntnise aus dem Projekt sollen nun der Weiterentwicklung der Fahrzeugtechnik dienen, des automatisierten Fahrens sowie der Mobilfunktechnik. Die aufgebaute Infrastruktur kann nun in weiteren Forschungsvorhaben genutzt werden.
Auch andere Forschungsinstitute und Unternehmen arbeiten an dem Problem mangelnder Übersicht in komplexen Verkehrssituationen. Der mittlerweile zu Audi, BMW und Daimler gehörende Kartendienst Here bietet seit vier Jahren einen Dienst an, mit dem aus Sensoren eines Autos gewonnene Daten anderen Autos zur Verfügung stehen. Ericsson testet zusammen mit BMW, der Bahn und Mobilfunkern 5G-Technik, um die Kommunikation zwischen Fahrzeug zu Fahrzeug, vom Fahrzeug zur Infrastruktur sowie die Digitalisierung der Eisenbahninfrastruktur mit 5G-Technik zu testen.


(anw)
