

Ferngesteuert fahren: Nur ein Zwischenschritt zum autonomen Auto?
Bis autonome Autos völlig ohne menschliche Hilfe zurechtkommen, dürfte noch einige Zeit vergehen. Hersteller und Forscher interessieren sich deshalb zunehmend für einen wichtigen Schritt davor: Die Fernsteuerung.
Kalifornien erlaubt ab Sonntag das Testen autonomer Kfz auf öffentlichen Straßen auch ohne menschlichen Aufpasser. Weil das nicht allen geheuer ist, gestattet das neue Gesetz auch eine Zwischenlösung: Fernsteuerung. Und Anfang Januar demonstrierte das US-Startup Phantom Auto bereits, dass sich Fahrzeuge über fast 900 Kilometer Entfernung fernlenken lassen. Der Fahrer befand sich im kalifornischen Mountain View, der Wagen in Las Vegas. Dies berichtet das Magazin Technology Review in seiner aktuellen Ausgabe 4/2018 (jetzt am Kiosk oder hier zu bestellen).
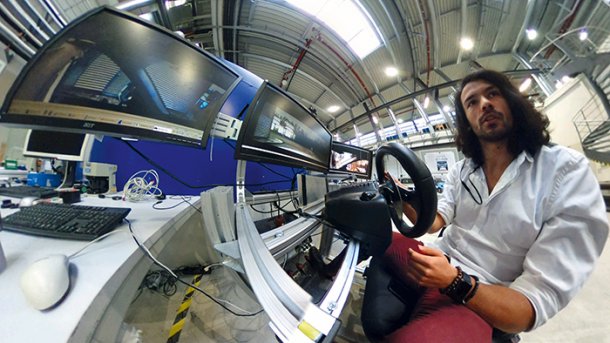
Schon seit 2010 arbeiten Forscher des Lehrstuhls für Fahrzeugtechnik der TU München am "teleoperierten Fahren“ – anfangs noch über 3G-Mobilfunk, heute über LTE. Auf ihrem Campus in Garching haben sie im Schnitt eine Latenz von 80 Millisekunden gemessen. Das klingt nach wenig, aber es kommt immer wieder zu Aussetzern von bis zu 500 Millisekunden. In dieser Zeit fährt ein Wagen mit Tempo 50 immerhin knapp sieben Meter weit.
Hoffen auf 5G
Damit der Fern-Fahrer die Videobilder aus den Bordkameras möglichst flüssig zu sehen bekommt, haben die Forscher einen Puffer von 200 Millisekunden eingebaut. Doch die Übertragung ruckelt gelegentlich immer noch. Deshalb hoffen die TU-Forscher nun auf den neuen Mobilfunkstandard 5G. Gerade waren sie in London, wo sie ihn gemeinsam mit Huawei ausprobiert haben. Sie kamen auf eine Latenz von relativ konstanten sechs Millisekunden, und das bei einer Auflösung von knapp 4K und einer Entfernung von über 60 Kilometern.
Jedes Mal, wenn ein autonomes Fahrzeug seine „Systemgrenze“ erreicht, könnte sich künftig ein Teleoperator einklinken und den Wagen manuell wieder ins vertraute Fahrwasser bugsieren. Zum Beispiel, wenn die eigene Fahrspur zugeparkt ist und der Algorithmus sich weigert, über eine durchgezogene Mittellinie zu fahren.
Der Teleoperator passt auf
Ein weiteres Szenario ist das autonome Fahren auf „Level 3“. Der Fahrer kann sich dabei im Prinzip zurücklehnen und die Elektronik fahren lassen. Zur Not muss er aber immer noch innerhalb einer bestimmten Zeitspanne eingreifen können. Doch die ständige Überwachung der Elektronik dürfte anstrengender und langweiliger sein, als selbst zu fahren. Hier könnte ein Teleoperator einspringen.
Doch damit sich solch ein Service wirtschaftlich anbieten lässt, müsste ein Operator stets mehrere Autos im Auge behalten. Könnte er dann noch schnell genug eingreifen? Beim jüngsten Unfall eines autonomen Uber-Autos war immerhin noch ein Testfahrer aus Fleisch und Blut an Bord, doch auch das hat den tödlichen Zusammenstoß nicht verhindert. Dies seien noch „interessante Forschungsfragen“, sagt der Projektverantwortliche Jean-Michael Georg. Mit seinen Kollegen arbeitet er weiter daran, sie zu klären. (grh)
