E-Auto: Continental entwickelt Laderoboter im Induktionsspulen-Format
Continental will mit dem Startup Volterio einen Laderoboter für E-Autos bauen. Mit 22 kW soll er ab 2024 erhältlich sein, später für öffentliche 50-kW-Lader.

(Bild: Continental)
Der Ingenieursdienstleister Continental Engineering Services (CES) will mit dem Startup-Unternehmen Volterio einen Laderoboter für Elektroautos entwickeln. Die Serienfertigung ist für 2024 in Deutschland geplant. Bis Mitte 2022 will CES erste seriennahe Prototypen bauen.
Videos by heise
Auf den ersten Blick ist das ein attraktiver Plan: Wie wäre es, wenn man das Elektroauto einfach parkt und weiß, dass es geladen wird, solange es an seinem Platz steht? Ohne Herauskramen des noch vom vergangenen Laden schmutzigen und ohnehin immer krangeligen Kabels oder des Hantierens in der engen Garage, in der man sich dann noch den Mantel am Auto verschmutzt?
Überlegungen dieser Art haben zur Idee des Induktionsladens geführt. Eine Spule im Boden und eine im Fahrzeug müssen bloß annähernd genau übereinander stehen und schon kann Strom über ein Wechselfeld vom Ladegerät ins Fahrzeug gepulst werden. Das Fraunhofer-Institut erprobt eine senkrechte Anordnung. Bei elektrischen Zahnbürsten und Smartphones haben wir uns schon daran gewöhnt, man kann so etwas für einen BMW 530e (Test) kaufen, Verkehrsbetriebe laden damit elektrische Linienomnibusse an den Endhaltestellen.
(Bild: Continental)
Positionierhilfen Kegel und UWB
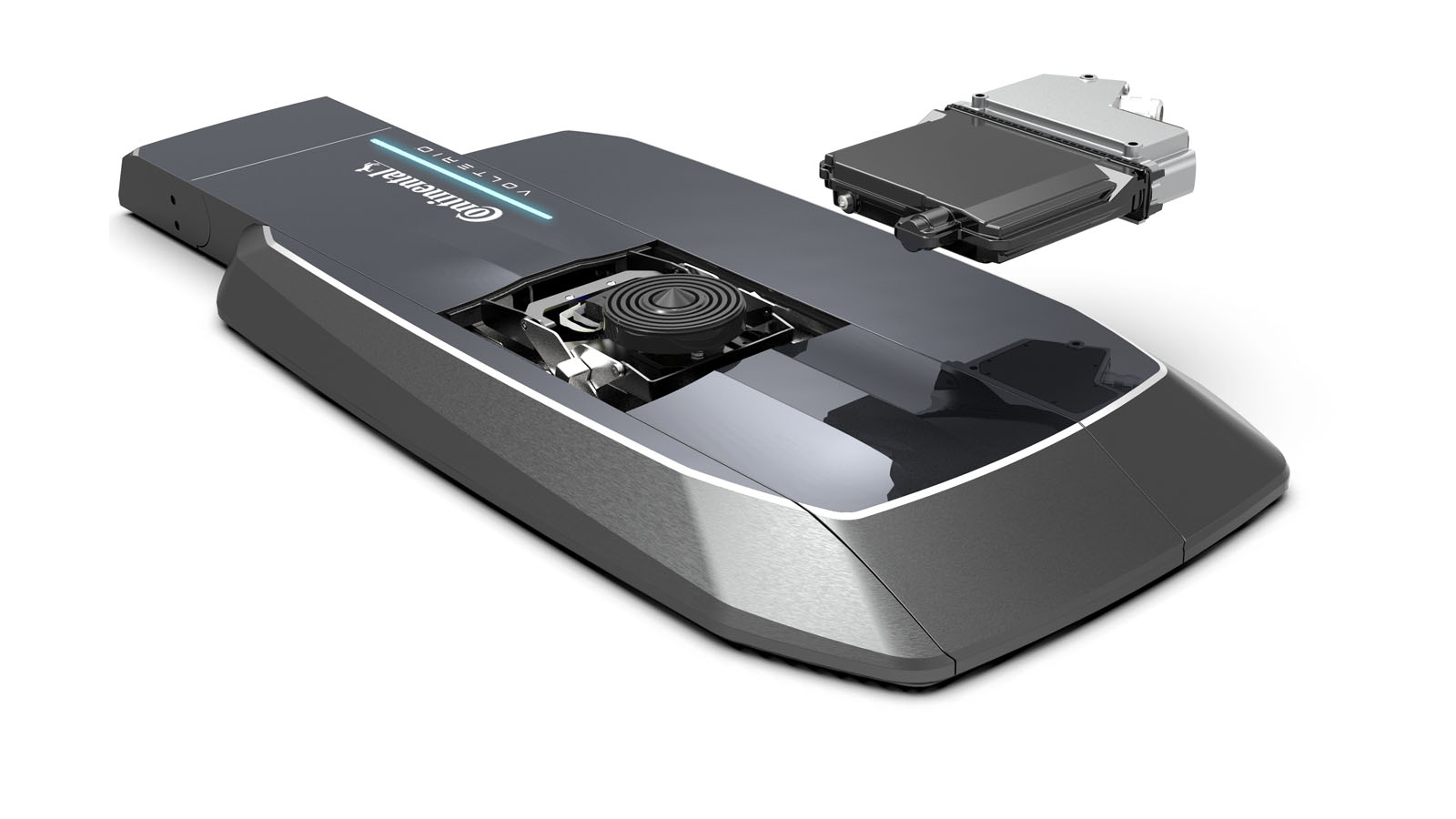
Eleganter geht es kaum, nur leider geht beim Laden eine Menge Energie verloren, in der Regel zwischen zehn und 20 Prozent. Immer wieder gab es daher auch Anläufe zu einer automatischen Steckerkopplung, denn der Ladeverlust über ein Kabel liegt im untersten einstelligen Prozentbereich. CES hat dazu bereits feste Entwicklungsvorgaben im Lastenheft festgehalten. So muss etwa der Laderoboter "bis zu 30 Zentimeter Abweichung von der idealen Parkposition" korrigieren können. Durch eine "kegelförmige Steckverbindung zwischen Boden- und Fahrzeugeinheit" soll der Winkel dabei immerhin keine Rolle spielen. Die beiden Einheiten sollen sich über Funk verständigen, der Ultra-Breitband-Funkstandard (UWB) soll dabei eine hohe Datenrate, eine stabile Verbindung und geringe Störung anderer Anwendungen sicherstellen.

(Bild: Continental)
Zunächst soll der Roboter für Privathaushalte mit einer passenden Leistung von 22 kW AC vermarktet werden und soll in bestehende Elektroautos nachrüstbar sein. Der Roboter passt in diesem Fall unter den Wagen und steckt das Ladekabel von unten ein. Für öffentliche Ladestationen soll eine Version mit einer Ladeleistung von mehr als 50 kW Gleichstrom entwickelt werden. Sie soll eine im Boden von Parkhäusern, Tankstellen oder Betriebsflächen versenkbare Einheit bieten, die in jeder Richtung überfahren werden kann. Auch bei ihr wird das Ladekabel von unten eingesteckt.

Ungelöste Kompatibilität
Wie bei kontaktlosen Ladespulen kommt dabei die Systemfrage der Kompatibilität ins Spiel, nur dürften die Probleme noch schwieriger lösbar sein: Der Laderoboter muss mit dem Anschluss am Auto zusammenpassen. Sollten sich die Hersteller von Laderobotik (Vorstöße gab es bisher etwa schon von Tesla, Volkswagen oder Easelink) nicht auf einen Standard einigen, wären öffentliche Ladestationen mit nur einem System nur von einem Teil der Elektroautos nutzbar.
(fpi)