Basic technology in the electric car: types of three-phase motor
Seite 2: Asynchronous motors
The power of a synchronous motor depends directly on the load angle: the greater the load angle, the more torque, which determines the power by the speed specified by the input gear and the instantaneous speed. If a PSM is to run freely, the control system must guide the field synchronously to the rotor speed with zero load angle. This requires sensitive control. An externally excited drive can simply switch off the excitation winding here: the magnetic field collapses, the rotor no longer induces a voltage in the stator.
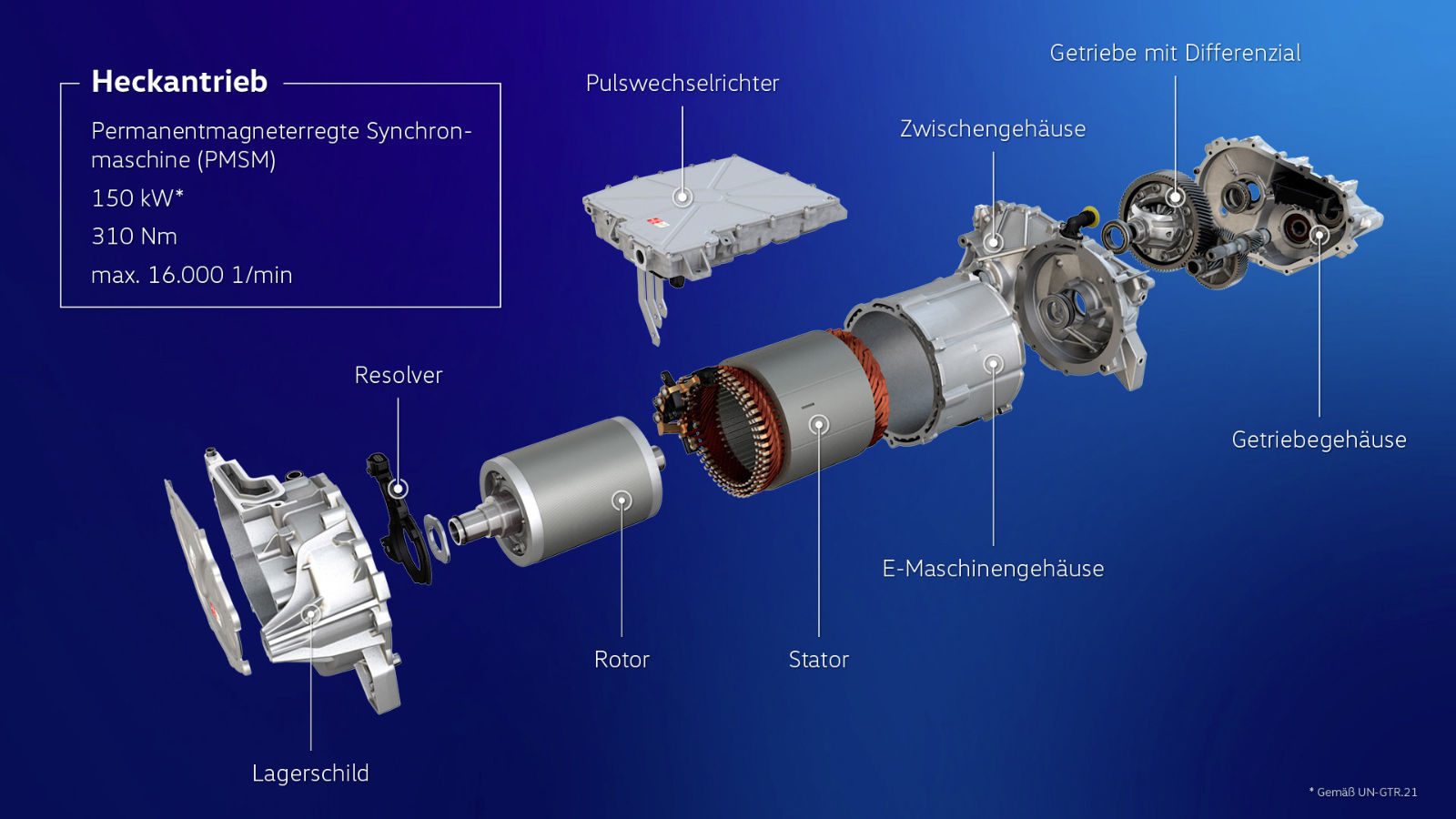
(Bild: Volkswagen)
The speed of a PSM is determined by the frequency of the applied alternating current. Most people interested in e-cars know that the converter turns the direct current from the battery into alternating current for the motors. However, you would need it even with an AC source if you a) want the variable speed range of a car instead of just a fixed speed as in many stationary applications and b) if you want to start from zero speed because an AC source usually only supplies a constant frequency. The German power grid, for example, supplies (with minimal deviations) 50 Hz. This means that a simple three-phase synchronous motor with one pole pair will run at 3000/min for the time being and still needs a starting device. A PSM, however, must cover a range from 0 to over 10,000/min. The converter and its control are therefore the central components for the quality of motor running, not only in PSM drives.
Asynchronmotoren
Asynchronous motors (ASM) in electric cars are also installed together with converters that supply variable AC frequencies. As with the synchronous motor, the name says it all: The rotating magnetic field from the stator and the rotor run at different speeds, i.e. "asynchronously", with "slip". To a certain extent, the slip determines the torque built up as a result. This characteristic arises from the fact that loops of conductive metal run in the asynchronous motor.
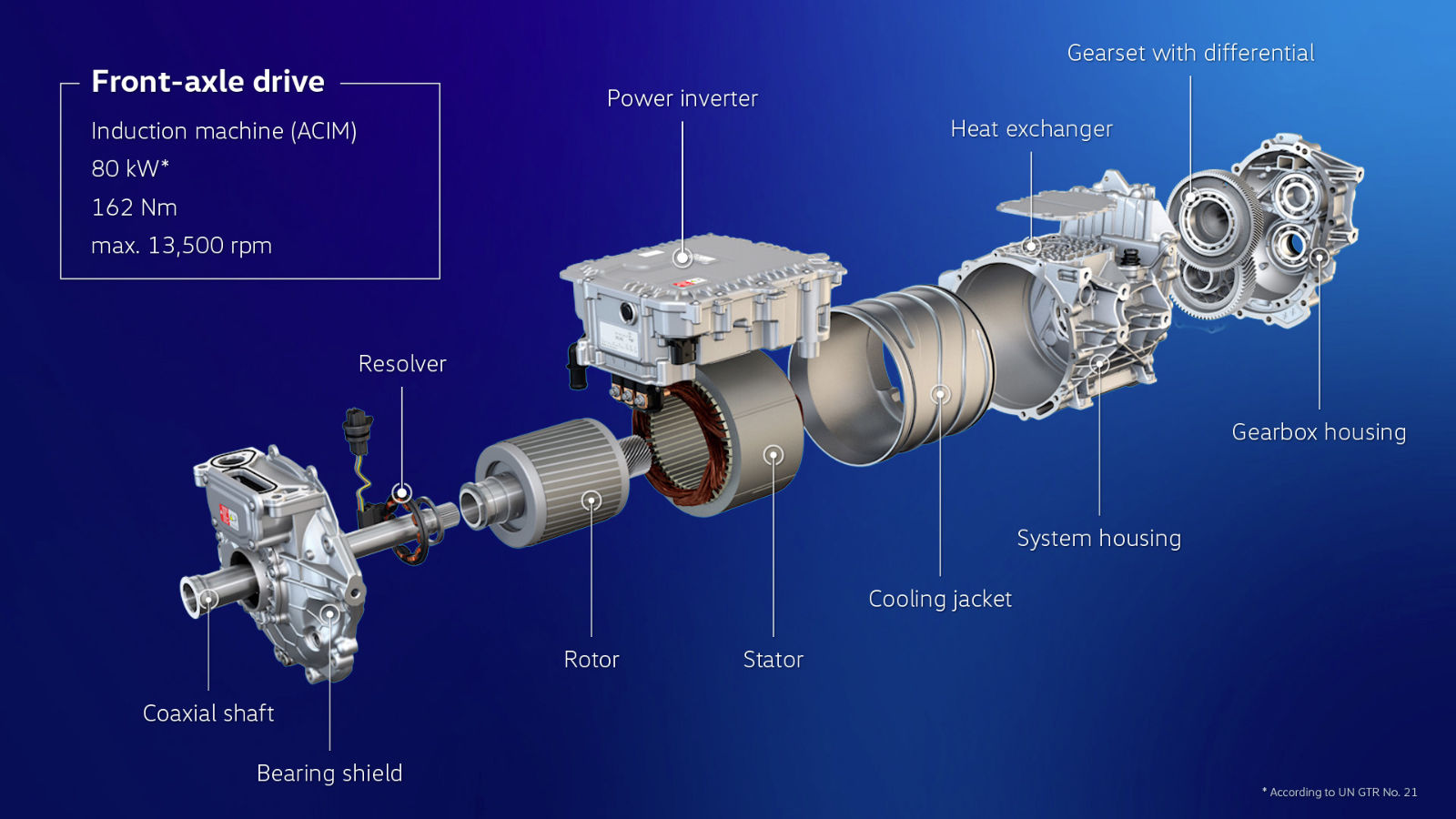
(Bild: Volkswagen)
The change in magnetic flux from the speed difference of the magnetic field of the stator with respect to the rotor induces a current in the rotor which flows short-circuited across the cage bars. This current and its magnetic field interact with that of the stator, causing the rotor to rotate. There are squirrel-cage rotors, in which the induced current is short-circuited via the cage, and there are slip-ring rotors, in which the current is conducted to the outside via slip rings, where it can run across resistors that influence its running behavior.
Loop in magnetic field
For understanding it helps to imagine a single loop in the magnetic field and then apply the understood principle to the cage. A single loop does not yet rotate 360°. Only the cage refines the principle so that the motor runs smoothly and does not hang. To counteract the risk of hanging, squirrel-cage rotors in vehicle construction usually use inclined bars, which prevents magnetic field resonances leading to hanging. For motor operation, the inverter controls the magnetic field to run ahead of the rotor (i.e. faster than the rotor speed), for generator operation it runs behind the rotor. At synchronous speeds, the torque drops to zero.
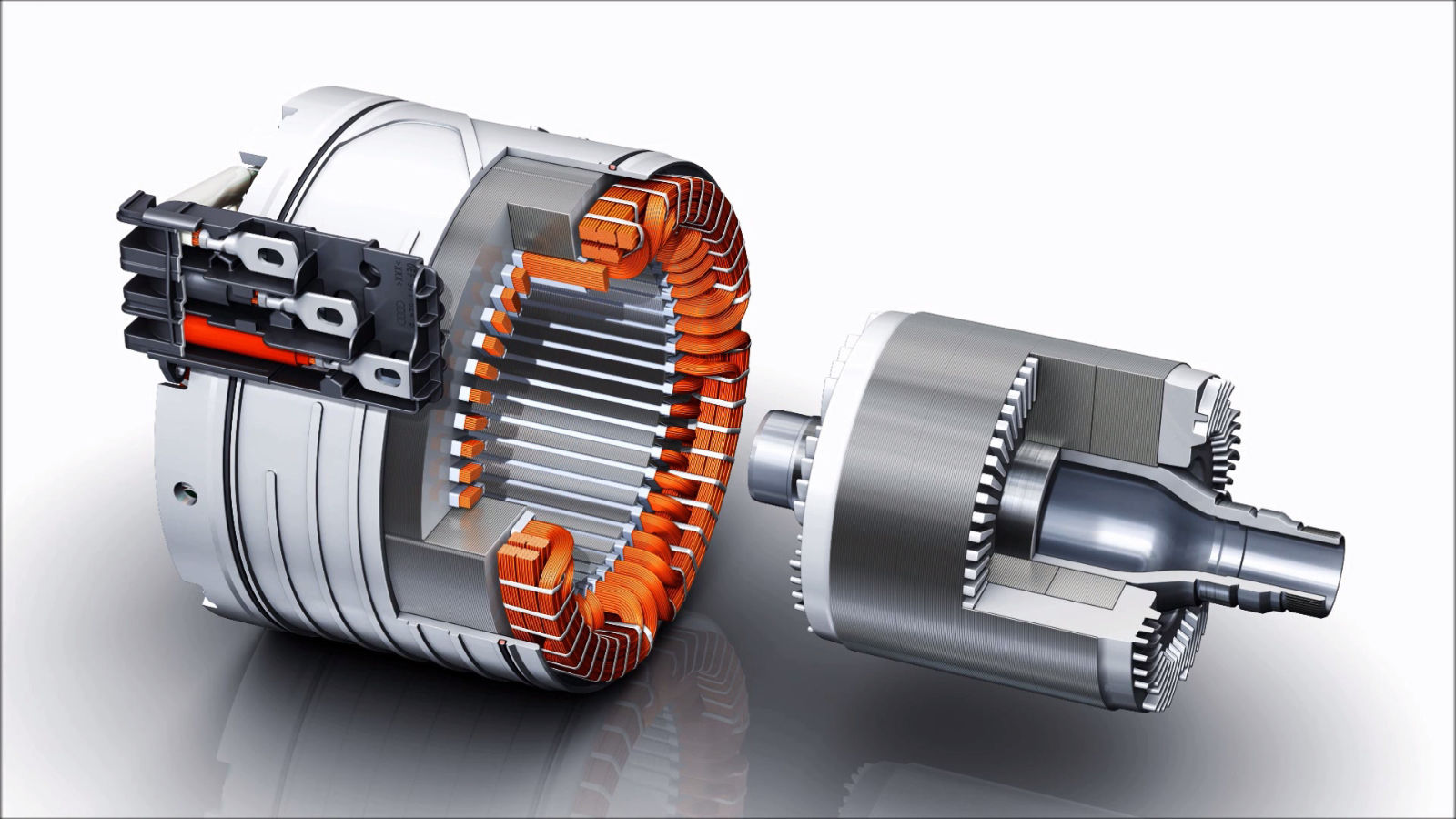
(Bild: Audi)
ASMs are very robust, do not require expensive permanent magnets and run freely when de-energized. In the VW ID.4 and ID.5 GTX, for example, Wolfsburg used them to drive the front axle for the all-wheel drive system. With such an only occasional twitching, one disadvantage of an ASM is hardly noticeable: They are less efficient than synchronous motors, especially at low to medium speeds, and therefore also produce more waste heat. In the e-tron, Audi therefore cooled the rotor of the ASM quite elaborately with a rotary union from the center.
Disadvantage: high starting currents
When Tesla converted from asynchronous to synchronous motors in Model S and X, the homologation range increased by up to 50 km. As the simplest design, ASMs also require very high starting currents, which must be countered by design, and they are one-fifth to one-third larger than comparable PSMs. However, due to their other advantages and low price, we will still encounter ASMs in cars in the future. In the future, we may also see so-called reluctance motors in cars.
The torque is generated by the fact that the magnetic rotor always aligns itself with the magnetic field in the respective applied field, striving for the lowest "reluctance" that gives it its name. This produces waste heat only in the stator, which can be cooled well, a great advantage for the car. Unfortunately, however, this produces much less torque than the motor variants described here. The first applications in cars will therefore be high-speed motors, even by electric motor standards. Let someone say again that only reciprocating engines are exciting!
(cgl)