Grundlagen-Technik im Elektroauto: Arten des Drehstrom-Motors
Beim Elektroauto wurde die Batterietechnik zum Fahnenträger, wo es bei Verbrennern der Motor war. Wir erklären die Technik, Unterschiede und Feinheiten.

(Bild: Audi)
(This article is also available in English)
Die durchschnittliche Effizienz eines Verbrennungsmotors im Realbetrieb liegt bei Messungen bei etwa 20 Prozent. 80 Prozent gehen als Abwärme verloren, davon macht sich nur ein kleiner Teil im Winter als Kabinenheizung nützlich. In so einem System zeigen sich Effizienz-Steigerungen eines Elektroautos sehr deutlich. Elektrische Antriebe wandeln die Energie im Speicher zu über 80 Prozent in Vortrieb um. Weil es kaum Abwärme gibt, brauchen Elektroautos im Winter folglich Heizenergie aus der Batterie. Dazu kommen rund 10 Prozent Ladeverluste. Diese erheblichen Unterschiede der Technik sind die Ursache der Unterschiede im erlebten Verbrauchsverhalten. Der E-Motor existiert länger als der Hubkolbenmotor. Trotz seiner längen Geschichte gab es in der jüngsten Zeit neue konstruktive Ideen speziell für den Einsatz in Fahrzeugen.
Elektromotoren: Stromverbrauch hat viele Einflussgrößen
Die E-Motoren selbst wandeln zu 90 bis über 95 Prozent elektrische in kinetische Energie um, am Motor geht also generell nur noch wenig verloren. Bei der Effizienz des Gesamtautos spielen sehr viele kleine Stellrädchen hinein, die komplex voneinander abhängen. Wenn also gleich Effizienzen von Motoren diskutiert werden, behalten Sie im Kopf, dass die eben auch nur solche Rädchen sind, und dass der letztendliche Stromverbrauch mehr als vom Motor von Batterie, Umrichter, Reifen und vor allem Anderen von der Aerodynamik abhängt. Eine effiziente Motorbauart kann problemlos ineffizient angesteuert werden, und es gibt gute Gründe, weniger effiziente Bauarten trotzdem zu bauen.

(Bild: BMW)
Packaging-Vorteile
Elektromotoren sind im Vergleich zu Hubkolbenmotoren sehr kompakt, sehr leistungsdicht. Ihr vergleichsweise geringes Volumen bei überschaubarer Abwärmeabgabe macht es möglich, sie nahe an die Achsen zu packen und dort mit anderen Bauteilen zu integrieren. Das heißt dann "integrierte E-Achse" und enthält mindestens Motor, Umrichter und Getriebe – eine beliebte Lösung bei Autoherstellern ebenso wie bei Zulieferern wie Bosch oder Schaeffler. Manchmal kommt noch ein Achsdifferenzial dazu (zum Beispiel bei ZF). Durch ihre enormen Packaging-Vorteile brachten E-Motoren außer der allseits bekannten Effizienz einen weiteren Vorteil, den nicht alle zu schätzen wissen, der aber dennoch allen nutzt: die Rückkehr des Hinterradantriebs in den Mainstream.
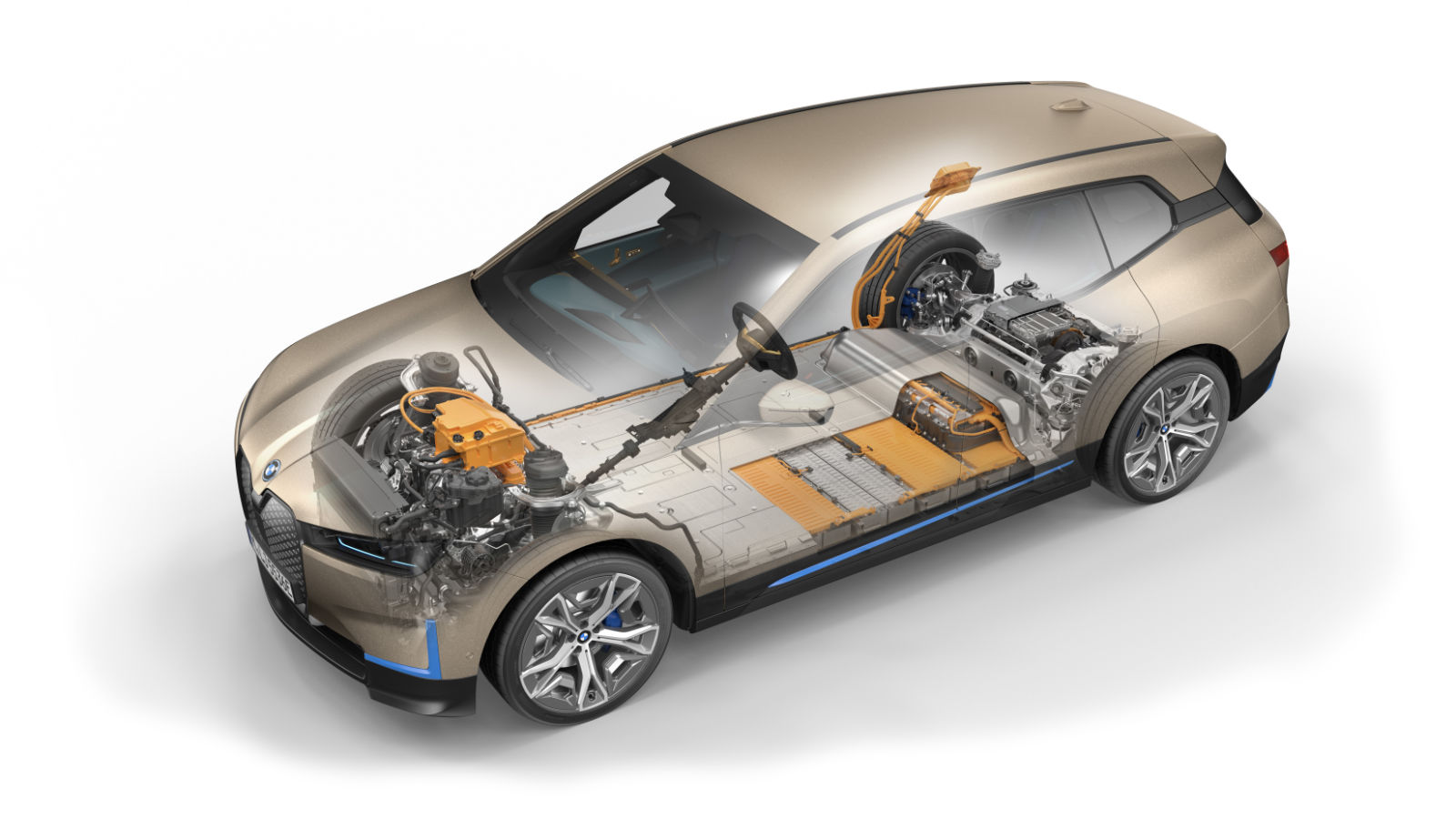
(Bild: BMW)
Bei einem Auto die Hinterachse anzutreiben, hat enorme Vorteile bei Lenkung, Fahrdynamik und damit Fahrsicherheit. Der Frontantrieb war immer nur ein Zugeständnis an Nutzwertigkeit, weil die Bauart "Lastesel vorn – Lastenraum hinten" hohe Ladefreiheit bietet. Wer die Ladehöhe mancher Kombis mit Hinterradantrieb im Vergleich zu Lastesel-Konkurrenten kennt, weiß das genau. Beim E-Auto braucht die Batterie aber ohnehin Raum im Unterbau, was die Vorteile des Frontantriebs mindert. Statt das Drehmoment eines Motors auf vier Räder zu verteilen, erlaubt der Elektromotor zudem, an jede Achse einen eigenen Motor zu bauen. Ein paar besonders kräftige Autos wie der Audi e-tron GT oder Teslas Model S Plaid verwenden sogar drei Motoren, zwei davon an der Hinterachse zum Verteilen des Drehmoments - auch bekannt als Torque Vectoring.

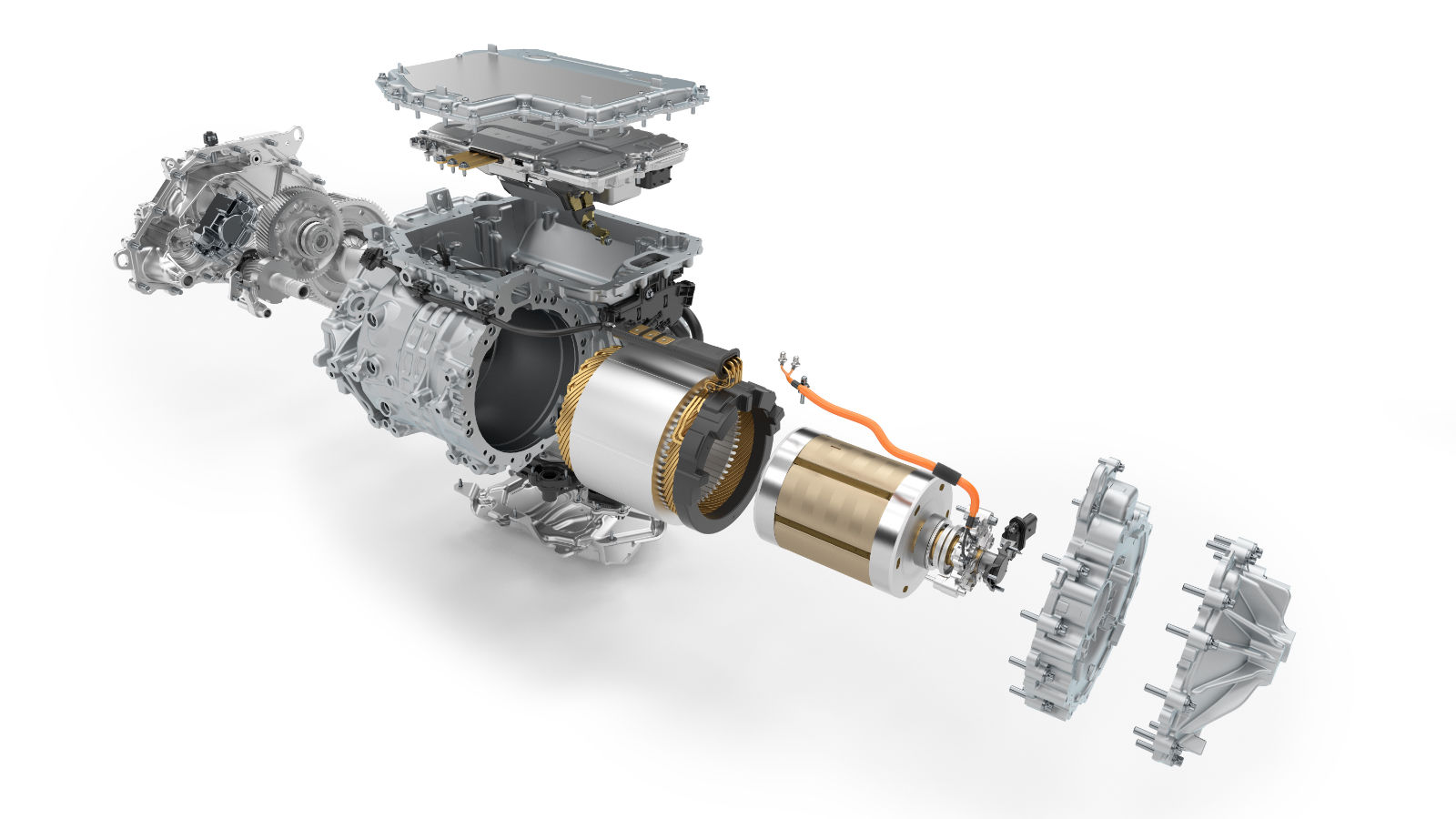
Gemeinsamkeiten aller Elektroautos
Elektromotoren arbeiten mit Spulen, die (so mit Strom versorgt) ein magnetisches Feld aufbauen. Dieses magnetische Feld im "Stator" (weil er relativ zum Fahrzeug steht) bewegt einen davon beeinflussten "Rotor" (weil er relativ zum Fahrzeug rotiert). Der Rotor liegt meistens innen, kann aber bei platten, breiten Bauformen wie etwa Radnabenmotoren genauso außen liegen. Es gibt elektrisch verschiedene Arten, Elektromotoren zu bauen, im E-Auto kommen jedoch heute nur noch Drehstrom-Motoren zum Einsatz.

(Bild: Porsche)
"Drehstrom" bedeutet: Wechselstrom auf drei Phasen, mit jeweils um 120 Grad versetzten Spannungsamplituden. Drehstrom kennen Sie vielleicht aus der Haustechnik: drei Phasen mit 230 V gegen Neutralleiter (oder mit 400 V gegeneinander), jeweils um 120 Grad phasenverschoben zueinander, so schließt man in Deutschland Häuser ans Niederspannungsnetz an. Für eine gleichmäßige Drehmomentabgabe im Motorbetrieb werden die Phasen auf Spulen in Vielfachen von drei aufgeteilt und der Rotor in seinen Magnetisierungseigenschaften entsprechend angepasst. Im Motor des Mini Cooper SE etwa rollt die Einziehmaschine 18 Spulen, auf die die drei Phasen verteilt werden.
Eine hohe Leistungsdichte wird erreicht, indem die Spulen möglichst dicht gewickelt werden, ohne sich kreuzende Drähte. Diese "Nutfüllung" soll hoch sein, weil sie das Leistungsverhalten des Motors bestimmt. Deshalb verwenden z. B. Porsche, BMW und Hyundai rechteckige Spulendrähte, was den Füllgrad von 45 bis 50 Prozent bei herkömmlicher Wicklung auf fast 70 Prozent steigert. Mit einem hohen Nutfüllungsgrad kann der Motor zudem Wärme besser ableiten.
(Bild: Porsche)
Elektroauto-Motoren: Arten von Erregung
Der am weitesten verbreitete Motor in Elektroautos ist der "permanent erregte Synchronmotor" (PSM). "Permanent erregt" bedeutet schlicht, dass der Rotor ein permanentes Magnetfeld dreht. Er besteht also aus Dauermagneten. PSM zeichnen sich durch hohe Leistungsdichte und Effizienz aus, deshalb verwenden zum Beispiel Formel-E-Teams diese Bauart. Üblicherweise werden zum Bau des Rotors viele kleine starke Magneten in einen feldführenden Weicheisenblech-Stack gesteckt, der auf eine Antriebswelle aus Stahl gepresst wird.
Videos by heise
Nachteile: Ein Dauermagnet lässt sich nicht abschalten, also induziert er bei Drehung immer eine Spannung in den Spulen des Stators, die im Fehlerfall (etwa beim Abschleppen mit toter Steuerungselektronik) Probleme machen können. Außerdem bestehen die starken Dauermagneten aus Neodym-Eisen-Bor. China dominiert den Neodym-Weltmarkt mit 95 Prozent, und baut zudem die Magnete am liebsten selbst.
(Bild: BMW)
Dieser Abhängigkeit sind sich viele Hersteller bewusst und bieten daher "fremderregte" Synchronmotoren an. Dabei wird der Dauermagnet durch einen Elektromagneten ersetzt, also durch Spulen mit Weicheisenkern. Die Stromversorgung der Rotorspulen geschieht entweder durch Schleifkontakte oder induktiv. Gute Konstruktionen verlieren gegenüber Varianten mit Dauermagneten nur ein bis zwei Prozent Effizienz. Zum Vorteil der höheren Rohstoff-Unabhängigkeit kommt, dass die Motorsteuerung die Feldstärke des Rotors per Stromzufuhr dosieren kann, wodurch diese Motorbauform sehr gut regelbar wird (und weniger Probleme mit dem Abschleppen verursacht). Nachteile: Der zusätzliche Bauaufwand für die Fremderregung macht den Motor komplexer und Schleifer sind Verschleißteile.
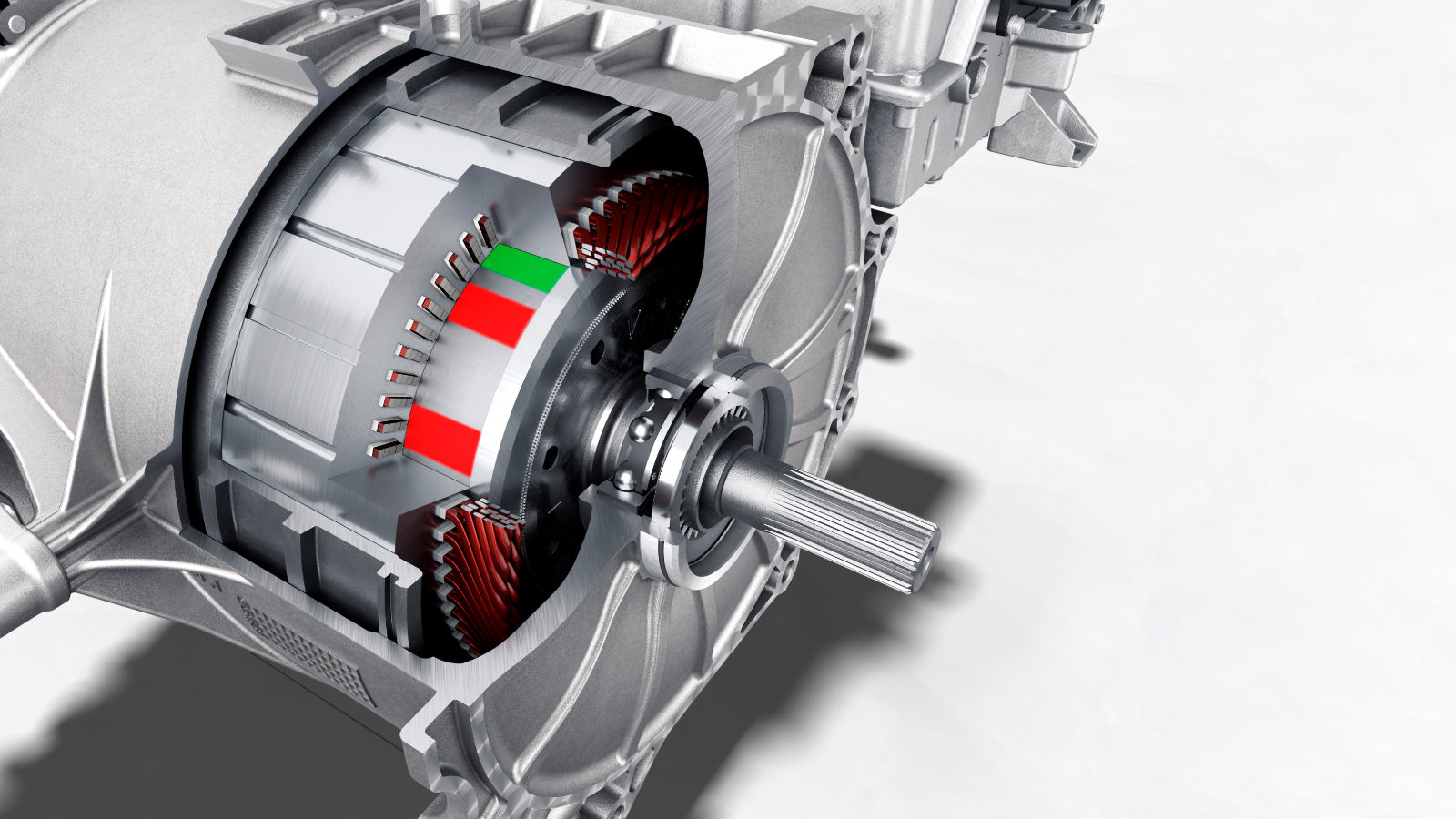
Synchronität
Das "synchron" des PSM wiederum betrifft das Magnetfeld im Stator in Relation zur Drehzahl des Läufers. Diese beiden Drehraten laufen (bei konstanter Last) zueinander synchron. Die Fahrwiderstände, die der Motor überwindet, führen zu einem Winkel, den der Läufer dem führenden Magnetfeld nacheilt. Dieser "Lastwinkel" oder "Polradwinkel" darf nicht zu groß werden, sonst reißt die synchrone Führung ab, der Motor "kippt" (liefert also kein Drehmoment mehr). Bei einem sehr einfachen Motor mit nur einem magnetischen Polpaar passiert das bei einem mechanischen Lastwinkel mehr als 90 Grad, bei üblicheren Ausführungen in Autos hängt der (mechanische) Winkel von der Anzahl der Polpaare ab. Im Generatorbetrieb dann ist es umgekehrt: Der Läufer eilt seinem im Stator induzierten Spannungsmuster um einen Lastwinkel voraus, der mit den Widerständen der Leistungserzeugung korreliert.